
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [65] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 8.3. ЗАМЕЧАНИЯ О ФОРМЕ ПОВЕРХНОСТИ ОТКЛИКА Рассмотрим две различные задачи оптимизации при проектировании схем: 1) минимизацию обобщенного показателя качества для отыскания возможного решения и 2) максимизацию вероятности функционирования схемы в заданных пределах в начальный момент времени, начиная с возможного решения. 8.3.1. Поиск возможного решения Начнем с отыскания возможного решения при проектировании схемы. Возможное решение будем определять как совокупность параметров элементов схемы, таких, при которой для любой комбинации параметров рабочих условий и внешних входных переменных схема удовлетворяет всем требованиям технических условий. Поиск возможного решения состоит в минимизации обобщенного показателя качества. Два определения этого показателя были предложены в п. 3.4.2.1. Для удобства приведем их снова: 2 (У1 - min - (.- min + max))/2) £=1 max min -t max £min где tji, i=l, m -значения отдельных выходных параметров являются функциями от номинальных значений входных характеристик д-хь дгл; , параметров рабочих условий и внешних входных характеристик Wi, Wp; щ - положительные веса ; -положительные четные целые числа. Поверхность отклика является целевой функцией У(лл:1, Х2, -Xn, Wi, W2, ... ..., Wp). Хотелось бы заранее установить некоторые свойства этой функции. Особенно важно выяснить, является ли она унимодальной или мультимодальной. Предполагаем, что параметры всех элементов непрерывно изменяются в областях около своих номинальных значений, т. е. стандартные дискретные значения пара-. метров, устанавливаемые с определенным шагом, здесь не рассматриваем. При таком предположении У1 и Уг являются непрерывными и дифференцируемыми функциями для всех переменных лх-, Хг, ..., .yX . Любая нелинейность соотношений iji и Xj будет отражена в обобщенном показателе качества. Это означает, что если iji как функция jXj (все остальные элементы заключены в области средних значений) имеет несколько КриСд/е постоянных жчений обобщенного похсзт.-ч>1 мчешВа Воз/ ожнд/ё решения 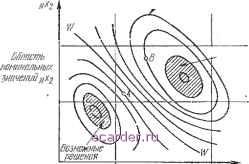 Область номинальных зиаченшцх Рис. 8.7. Поверхность отклика ирн наличии двух относительных минимумов. ПИКОВ, то поверхность отклика может также иметь несколько пиков, т. е. быть мультимодальной. Мультимодальность поверхности отклика приводит к двум затруднениям при решении задачи оптимизации. 1. Если поиск возможного решения завершается на локальном минимуме показателя качества, а не на глобальном, то последующая оптимизация почти наверняка приведет к отысканию субоптимального решения. 2. У-поверхность может иметь такую форму, или область поиска для значений х может быть такой, что допустимое или возможное решение будет найдено только при движении к одному определенно.му минимуму, но не будет найдено, если начальная точка выбрана так, что поиск направлен к другому минимуму. На рис. 8.7 представлена предположительная ситуация такого типа для случая двух входных переменных. Если возможное или допустимое решение не найдено с помощью первой начальной точки, то нужно попытаться использовать другие точки, прежде чем расширять пределы поиска 202 или изменять технические условия для оптимизируемой I схемы. Необходимо отметить, что рис. 8.7 иллюстрирует исключительный случай, который не должен повлиять на общую оценку эффективности метода поиска по конфигурации. (Минимизация обобщенного показателя качества прп пспользовании начальной точки поиска ниже линии W-W (точка Л) не приводит к отысканию возможного решения, тогда как начало поиска точки, расположенной выше линии W-W (например, точки В), обеспечит его отыскание). 8.3.2. Поиск максимума вероятности соответствия схемы техническим условиям в начальный момент Бремени Вероятность удовлетворения схемой требованиям технических условий в начальный момент времени обычно представляет неизвестную сложную функцию входных псре.менны.х, их распределений вероятностей, выходных переменных и ограничений, а также параметров рабочих условий. Иногда эту вероятность можно найти функционально некоторыми методами, например, геометрически (Беккер, 1961; 1963). В общем же случае не существует методов определения формы поверхностп отклика, не считая эвристических. Для конкретных схем указанный показатель качества можно максимизировать, начав с различных совокупностей номинальных значений входных переменных л-ль .vXii, а затем сравнив результирующие опти- мизированные значения этого показателя, а также значение, соответствующее совокупности номинальных значений. Существует пять различных типов поверхностей отклика, характеризующих оптимизируемый показатель: - имеется один ярко выраженный максимум с резкими склонами в любом направлении от него; - у поверхности отклика имеется один максимум, но эта поверхность плоская во всех направлениях вблизи максимума; - у поверхности отклика имеется один максимум, расположенный на крутом гребне; - у поверхности отклика имеется два относительных максимума или более, но различие между локальным и глобальным максимумами незначительно; 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [65] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 |