
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [16] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 Y л л л Л Л TTTTIT к остальной части матрицы АЦМ АЦМ АЦМ АЦМ 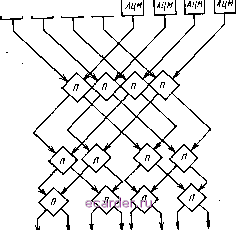 Лцч? ЛучЗ Луч5 Лцч! Лцчб Лдч2 Лцч!* Лучв - 9) Рис. 5.5 ]1 . t При увеличении числа лучей, числа модулей в решетке и ширины полосы сигнала реализация алгоритма ДПФ встречает значительные трудности. Как показано в § 5.3, для антенны обычной обзорной РЛС необходимо быстродействие процессора, близкое к триллиону операций в секунду. Реализация такого быстродействия на известной микропроцессорной технике пока является проблематичной. Число операций может быть существенно сокращено при переходе к алгоритму быстрого преобразования Фурье (БПФ). Процессор, реализующий этот алгоритм (рис. 5.5,6), производит частичное поэтапное умножение данных и перекрестное сложение пар сигналов до тех пор, пока на выходе не образуется полный набор всех ДН. Аналогом такого процессора является матрица Батлера. Раздельное управление диаграммами, а также их адаптация и коррекция в этом случае невозможны. Применения алгоритма БПФ требует также существенного увеличения памяти ЗУ. Указанные особенности алгоритмов ДПФ и БПФ необходимо учитывать при выборе способа формирования ДН, чтобы минимизировать объем аппаратуры СФДН [3, 10, И]. Более подробно эти алгоритмы рассмотрены в следующих разделах. Алгоритмы адаптации ДН исследованы в [7, 12, 13], алгоритмы коррекции ДН в [4, 7, 8, 9, 22 - 24]. Необходимо отметить, что эти алгоритмы не требуют такого быстродействия, как алгоритм формирования ДН, так как и адаптация, и коррекция ДН могут осуществляться с темпом, существенно более низким, чем формирование ДН. Наиболее распространенным [3, 6, 9, 23, 24] является построение ЦАР, при котором аналого-цифровые модули конструктивно располагаются прямо за раскрывом решетки, а СФДН - в шкафах или контейнерах вместе с другой цифровой аппаратурой системы. При этом информация передается с антенны в цифровом виде. Встречаются и другие варианты размещения аппаратуры. Например, устройства управления весовыми коэффициентами могут входить в состав модуля и размещаться в апертуре решетки. Иногда, наоборот, эти устройства вместе с АЦП.входят в состав СФДН, а информация с антенны передается на промежуточной частоте. Последний вариант размещения облегчает обслуживание аппаратуры. Использование ЦАР в радиолокационных и связных системах повышает их информационные возможности и улучшает ряд характеристик. Указанные выше схемные и алгоритмические особенности ЦАР позволяют перечислить те основные преимущества, которые имеет этот тип приемных антенн перед другими антеннами. Количество ДН и управление их положением в пространстве. Наличие оцифрованной амплитудно-фазовой информации от всех элементов решетки позволяет мгновенно сформировать ее диаграмму направленности в любом направлении (в пределах рабочего углового сектора решетки). При необходимости, например для обеспечения моноимпульсной работы системы, могут быть сформированы пучки диаграмм, имеющих различные щирину и уровень пересечения. Диаграммами может быть заполнен и весь рабочий сектор. Все эти операции в ЦАР в отличие от аналоговых АР выполняются без энергетических потерь. Форма диаграмм направленности. Цифровое управление весовыми коэффициентами дает возможность осуществлять адаптацию ДН, придавая ей не только необходимое направление, но и заданную форму. Специально подобранные и хранящиеся в памяти процессора адаптации ДН амплитудные распределения позволяют сформировать диаграммы с низким уровнем лепестков в необходимых угловых секторах. Может быть реализована и более сложная форма диаграммы направленности, учитывающая внешнюю сигнальную обстановку, к тому же трансформирующаяся во времени при изменении этой обстановки. Так, если по боковому лепестку диаграммы воздействует сигнал, мешающий приему по главному лучу, то в направлении на источник этого сигнала формируется дополнительная диаграмма направленности, которая позволяет осуществить его компенсацию (создать провал в основной диаграмме) алгоритмическим путем. При большом числе таких сигналов образуется необходимое количество провалов. В результате ЦАР становится пространственным фильтром, который выделяет полезный сигнал на фоне мешающих излучений и придает диаграмме направленности форму, оптимальную для сложившейся ситуации [12, 13]. Стабильность формы и положения диаграммы направленности. С другой стороны, цифровое управление весовыми коэффициентами позволяет быстро устранять погрешности амплитудно-фазового распределения, возникающие в аппаратуре ЦАР в процессе работы. С этой целью в каналы ЦАР периодически вводится контрольный сигнал. Амплитуда и фаза этого сигнала в каждом канале сравниваются с эталонными, хранящимися в памяти процессора коррекции ДН, после чего в устройства управления весовыми коэффициентами модулей вводятся необходимые поправки. В результате форма и положение диаграммы направленности ЦАР всегда близки к расчетным. Это значительно повышает точность измерения угловых координат цели в радиолокаторе, а также позволяет с помощью ЦАР успешно реализовать многоканальные радиолокационные измерители, в которых одновременная обработка совокупности сигналов, принятых по нескольким каналам, дает возможность повысить разрешающую способность системы выше рэлеевского предела [14-16]. Система коррекции ДН позволяет производить юстировку антенны с учетом переотражений сигнала, возникающих на реальной позиции. Для этого источник контрольного сигнала должен быть размещен в дальней зоне [7]. Динамический диапазон. Важным достоинством ЦАР является отсутствие физических причин для ограничения суммарной амплитуды при сложении в цифровом виде сигналов, принятых отдельными модулями. Это позволяет получить на выходе решетки дн- намический диапазон, превышающий динамический диапазон входного усилителя в число раз, равное числу модулей решетки. Ниже этот вопрос рассмотрен более подробно. Цифровым антенным решеткам присущи и недостатки. В пер-? вую очередь это сложность системы, состоящей из десятков или сотен аналого-цифровых модулей и многопроцессорного вычислительного комплекса, к которому предъявляются очень высокие требования по быстродействию. Большой проблемой является разводка по апертуре решетки сигналов нескольких гетеродинов и синхронизации при весьма жестких требованиях к одновременности их прихода ко всем модулям ЦАР. Ухудшают характеристики ЦАР шумы, связанные с дискретностью квантования сигнала и весовых коэффициентов [17, 18]. Влияние этих шумов рассматривается ниже. ЦАР имеет ограничение по ширине полосы обрабатываемого сигнала, связанное с быстродействием АЦП, применяемого в модуле. Известно, что для восстановления сигнала, спектр которого имеет максимальную частоту /, необходимо знать его значения в последовательные моменты времени, отстоящие друг от друга на интервал Д1/2/. Если сигнал сосредоточен в полосе частот между /н и /в, то можно записать V{t)- I и (д Д) t;/- - ( - cos 1я (/з - / ) (/ - , А)]. (5.1) д= ос Л (/в - /н) (t-qA) Здесь Д=1/2(/в-f ). Для восстановления можно использовать выбор.ки аналитического сигнала, представленного в виде суммы собственного сигнала U{t) и сопряженного с ним по Гилберту V(t): Wit) = U{t) + iV{t). (5.2) Период квантования в этом случае увеличивается в два раза, хотя число отсчетов остается таким же, как и в (5.1). Сигнал может быть восстановлен и по выборкам синфазной S{i) и квадратурной o{t) составляющих при представлении его в форме и {t)=S (t) cos (Oat -а (t) sin (Оц t. Выражения для восстановления сигнала будут отличаться от приведенных выше, но число выборок во всех случаях должно быть не менее 2Д/ в секунду. Возможность АЦП, входящего в состав модуля, обеспечить требуемое число выборок и определяет полосу частот сигнала, принимаемого ЦАР. 5.2. ВАРИАНТЫ ЦИФРОВОГО МЕТОДА ФОРМИРОВАНИЯ ДИАГРАММ НАПРАВЛЕННОСТИ Наиболее простым является формирование ДН путем сложения сигиалов, откваитоваииых о разные моменты времени и соответствующих одному волновому фронту (рис. 5.6). Прн реализации этого метода период киаитопання сиг- 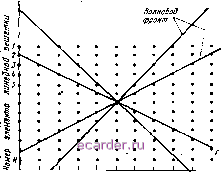 л/ 2М JAt Ш. Номер периода кВпнтобания Рис. 5.6 налов составляет некоторую часть времени, необходимого волне для распро-<;транення от одного излучателя к другому, что много меньше, чем это необходимо в соответствии с теоремой В. А. Котельникова. Например, если Я= =0,6 м, а расстояние между излучателями равно половине длины волны, ю д=10-9 с, и если в секторе 0-90* требуется получить порядка десяти ДН, то частота квантования должна быть яе менее 1 ГГц, что в настоящее вре- J мя реализовать нельзя. Поэтому метод применяют только в гидролокации, где диапазон частот на несколько порядков ниже. Так как период квантования, требуемый дли восстановления сигнала, больше периода, необходимого для формировании ДН, то для определения сигнала в пределах периода квантования применяются различные методы интерполяции ![20]. При этом сигнал между моментами квантования может быть определен о помощью рядов типа (5.1). Процесс восстановления сигнала в этом случае можно рассматривать как пропускание последовательности импульсов через идеальный полосовой фильтр, имеющий постоянную функцию передачи в полосе частот сигнала и ноль на остальных частотах. При реализации фильтра на ЭВМ в периодическую последовательность вводят ноли, которые заполняк тся после прохождения последовательности через фильтры. Если точки интерполяции выбраны часто, то можно сформировать диаграмму в любом заданном направлении, подбирая для каждого излучателя моменты времени, близкие к требуемым для ДН, как это делается в ФАР при использовании дискретных фазовращателей. Положения точек интерполяции могут меняться и плавно. Достоинством рассмотренного способа является отсутствие зависимости углового положения ДН от частоты. Более простой в реализации оказывается схема формирования ДН с введением фазового сдвига в принятый сигнал [2]. В этом случае принятый сигнал должен быть представлен в аналитической форме, Т. е. по принятому сигналу um,n(t) должен быть получен сигнал, сопряженный с ним (т, га -номер излучателя в решетке, имеющей mxn излучателей). Таким образом, принятый сигнал можег быть записан в форме (5.2). Умножая сигналы от каждого излучателя на множитель амплитудного распределения Om.n и вводя фазовый сдвиг фт,п, получаем алгоритм формирования ДН иа ЭВМ для каждого момента квантовании tp-. {.р) = Е ,r.ih) г.. г. Р (- i ). : (5.3) т, п Оценим объем вычислений при формировании ДН по рассмотренным алгоритмам. В случае интерполяции положение максимума диаграммы определяется соотношением sine = -. (5.4) где d - шаг излучателей; с - скорость света; М - математическое запаздывание сигналов между двумя соседни.ми излучателями, которое вводится относительно момента квантования для формирования ДН требуемой формы в заданном направлении. Полагая момент квантования равным нулю и ограничивая ряд (5.1), находим для т-го излучателя линейной решетки g=-Q Я (/в - h)Am ht - q) Хсо8[я(/в + /в).( -Д/-?Д)1. (5.5) Тогда ДН линейного излучателя с максимумом в направлении, определяемом выражением (5.4), будет равна т=-М (5.6) Число членов в (5.5) определяется допустимой ошибкой интерполяции. К сожалению, этот вопрос для ряда (5.5) недостаточно исследован. Рассмотрим точность интерполяции относительно нулевого временного отсчета в пределах одного периода квантования и определим необходимое число членов ряда для идеального случая квантования высокочастотных импульсов прямоугольной формы с длительностью т. При этом можно считать, что спектр сигнала сосредоточен в области -2/T</<-f-2/T. Для восстановления сигнала отсчеты нужно производить через интервалы времени т/8, при этом на импульс приходится восемь отсчетов. Ошибка интерполяции в этом случае может быть оценена формулой f(0-f/Q(OI< 6q sm~ 2QA2 (QA)2 - /2 2 UHq)+ 2 U(q). 4=Q+1 -oo 5.7) В TOM случае, когда -- \u(t)~u(t)\- Если Q>8, то моменты времени в (5.7) соответствуют нулевым значениим сигнала. Таким образом, Q должно быть не менее 9. Так как значения известных функций в заданные моменты времени могут быть заранее вычислены (с учетом умножения на a ,) и помещеныв память процессора, то для формирования одной ДН в каждый период квантования в соответствии с (5.5), (5.6) необходимо произвести не менее \9mn умножений на коэффициенты, находящиеся в пумяги. 4-178 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [16] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 |