
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 [71] 72 73 74 75 76 77 78 79 80 81 82 Транзисторе f, которое генерирует имИульс длйТеЛЬМб-стыо Тз (диаграмма 2). Срезом этого импуЛьса запускается-одновибратор Т4, Т5, который является формирователем зондирующих импульсов суперизации ФЗИ: На вход модулятора М (транзистор Т6) импульсы с ФЗИ н ФПИ подаются через развязывающие диоды Д13, Д14 (диаграмма 3), Сверхрегенератор выполнен на транзисторе Т7 по . схеме с общим коллектором. Модулятор 16 меняет глубину положительной обратной связи с частотой суперизации. Подобный СР имеет широкий динамический диапазон по входу и отличается высокой стабильностью усиления при изменениях температуры и напряжения питания. Частота заполнения вспышек определяется резонансной частотой контура, образованного индуктивностью L и емкостью преобразователя КП, подключенного к индуктивности через разделительный конденсатор С13. Напряжение смещения для КП вырабатывается пиковым детектором Д16, Д17, С12, С14 и подается на КП через резистор R26. Вспышки СР показаны на диаграмме 4. Для исключения флуктуации амплитуды зондирующих вспышек на вход СР через небольшую емкость С8 подаются короткие импульсы, полученные в результате дифференцирования фронтов импульсов ФЗИ. Таким образом реализуется ударный запуск для зондирующих и безударный- для приемных вспышек. В отсутствие объекта амплитуда приемных вспышек мала и определяется собственными шумами СР и КП. Если объект появляется в зоне обнаружения в момент t\, то амплитуда приемных вспышек увеличивается. Расстояние между КП и зоной обнаружения /1 = с(Гс-Тз-Ту-Тс±Дт/2)/2, где Ту - длительность зондирующего импульса суперизации; Xc=tb-tz\ Ax-AD/c, дЬ -размер зоны обнаружения в радиальном направлении. Выделение приемных вспышек из общей последовательности сигналов на выходе СР и их детектирование осуществляются схемой стробирования СС (транзисторы Т8, Т9). На Т8 подаются стробирующие импульсы (диаграмма 2), на ГР -сигналы СР (диаграмма 4). В результате на выходе схемы наблюдается огибающая только приемных вспышек в то время, когда их амплитуда АрбЁЫШаёт йекоторый порог, устанавливаемый делителем R21, R22. В обнаружителе применяется специальное устройство обработки выходного сигнала УО с бинарным вйходом, которое может быть легко согласовано с системами цифровой автоматики. В данном случае бинарный сигнал УО поступает на блок индикации (Инд), состоящий из транзистора Т12 и лампы накаливания Л. Работа УО иллюстрируется диаграммами 5, 6, 7. На один из входов симметричного триггера Т10, Т11 пода- 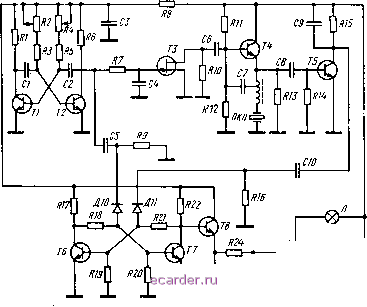 Т9 \ Рис. 6.15. Принципиальная схема адаптивного обнаружителя ются устанавливающие импульсы, которые формируются (дифференцируются) из фронта импульсов задержки (диаграмма 5). На другой вход поступает выходное напряжение схемы стробирования. На выходе триггера (диаграмма 7) наблюдаются низкий потенциал (сигнал О ) в отсутствие объекта и практически постоянный высокий потенциал (сигнал 1 ) при появлении объекта. Экспериментальные исследования показали, чтО характеристики обнаружения данного устройства совпада- ют с подобными же характеристиками импульсного обнаружителя с квадратурно-корреляционным приемником. В адаптивном обнаружителе на основе классического СР (рис. 6.15) СР на транзисторе Т4 генерирует зондирующие вспышки, которые формируются отраженными сигналами. Генератор суперизации TI, Т2 управляет сопротивлением модулятора ТЗ, осуществляющего безударный запуск СР. Пьезокерамический преобразователь ПКП, включенный в контур СР, излучает зондирующие вспышки с частотой заполнения 22,5 кГц и принимает : отраженные сигналы. Режим больших колебаний имеет место при появлении объекта в зоне, находящейся на расстоянии /1=с(Гс-Тс±Ат/2)/2 от ПКП. В отсутствие объекта СР работает от собственных шумов в режиме малых колебаний. Отношение амплитуд выходных вспышек в режимах больших и малых колебаний (адаптивность D) достигает 60 дБ при обнаружении объектов на расстоянии 3 м. Время обнаружения прибора зависит от коэффициента адаптивности D, расстояния h и эффективной площади отражения объекта. Например, объект типа железнодорожного вагона обнаруживается на расстоянии 10 м за 430 мс (D-100). Для сравнения отметим, что время обнаружения для неадаптивного локатора при тех же условиях составляет 60 мс. Адаптивный обнаружитель можно получить с помощью несложного изменения схемы на рис. 6.13. Для этого достаточно отключить ФЗИ от УЗ (разорвать цепь конденсатора С4) и резистором R4 выставить амплитуду вспышек СР, достаточную для возникновения инкремент-ного процесса при появлении объекта в зоне. Иногда необходимо изменять в широких пределах размеры зоны обнаружения и мертвой зоны. Размер зоны обнаружения в радиальном направлении определяется длительностью вспышки СР, которая в свою очередь жестко связана с собственной частотой системы. Эта частота выбирается с учетом резонансных свойств преобразователя и условий распространения акустических колебаний в среде. Поэтому для каждого конкретного обнаружителя размеры зоны обнаружения и мертвой зоны фиксированы. Например, обнаружитель на основе СР с собственной частотой 13 кГц, работающий в воздушной 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 [71] 72 73 74 75 76 77 78 79 80 81 82 |