
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 [72] 73 74 75 76 77 78 79 80 81 82 среде, имеет мертвую зону около 5 м при ширине зоны обнаружения около 3 м. Для изменения размеров указанных зон при заданной частоте заполнения зондирующих импульсов можно использовать двустороннее преобразование частоты. Показатели адаптивного обнаружителя с подобным преобразованием (рис. 6.16): собственная частота CP 80 кГц, частота заполнения зондирующих вспышек 13 кГц, ширина мертвой зоны 0,3 м, ширина зоны обнаружения 0,1 м, дальность обнаружения до 35 м, потребляемая 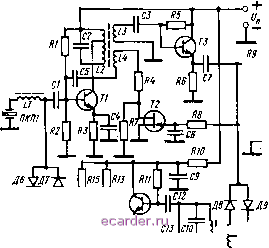 .2> , >L6 I I -L JLX X X Рис. 6.16. Принципиальная схема адаптивного обнаружителя с преобразованием частоты мощность в режиме малых колебаний 20 мВт, в режиме больших колебаний 300 мВт, напряжение питания 12 В. Сверхрегенератор (транзистор Т1) построен на основе трансформаторного автогенератора, в цепь обратной связи которого включен модулятор Т2. Подобное устройство отличается высокой экономичностью (ток потребления 0,8 мА). На вход модулятора импульсы с ГС пода-. ются через интегрирующую цепочку R8C6. Прямое и обратное преобразования частоты производятся балансными смесителями Д8, Д9 и Д6, Д7, а также общим гете- родйном на транзисторе Т5. Частота гетеродина равна 93 кГц. Транзистор Т4 выполняет роль фазоинвертора. Вспышки СР через эмиттерный повторитель ТЗ поступают на смеситель Д8, Д9, на выходе которого после фильтра R9C8 наблюдаются радиоимпульсы с частотой заполнения 13 кГц. Эти радиоимпульсы усиливаются и подаются на излучающий преобразователь ПКП2. Усилитель (выходная мощность 200 мВт) работает в классе В. Отраженные импульсы воспринимаются преобразователем ПКП1, который подключен к смесителю Д6, Д7 через согласующую индуктивность L1. Роль фильтра на выходе смесителя выполняет непосредственно СР. Устройство индикации (Инд) подсоединено к выходу усилителя и фиксирует превышение амплитудой вспышек некоторого порогового уровня. Использование усилителя на выходе СР существенно повышает мощность зондирующих импульсов и увеличивает дальность обнаружения. В то же время благодаря адаптивности по излучаемой мощности применение усилителя почти не увеличивает ток потребления схемы обнаружителя, если только .объект появляется в зоне обнаружения достаточно редко. Это объясняется тем, что большую часть времени схема работает в режиме шумовых вспышек, когда ток, потребляемый усилителем в классе В, мал. Описанные выше устройства применяются в системах автоматического управления в качестве датчиков положения технологического транспорта и устройств предупреждения столкновения движущихся объектов. 6.4. Сверхрегенеративные дальномеры Сверхрегенеративные дальномеры в большинстве случаев являются развитием обнаружителей, построенных на основе классических или параметрических СР. Их особенность заключается в перестройке периода суперизации или накачки так, чтобы непрерывно поддерживать равенство между временем запаздывания и 7с или пТн, где Гп -период накачки; rt -некоторое целое число. Примером устройства с перестройкой периода суперизации Гс является высотомер, описанный в § 5.6. Ниже описывается следящий дальномер на основе классического СР, в котором подстройка периода суперизации осуществляется более простым способом. Кро-15* 219 ме того, приводится функциональная схема и поясняетсй принцип действия дальномера на основе параметрического СР. Последний характеризуется высокой точностью и неоднозначностью измерения дальности. Адаптивный дальномер на основе классического СР. Он состоит (рис. 6.17,а) из CP, амплитудного детектора АД, управляемого по частоте генератора суперизации УГС и корректирующего фильтра Ф. Зависимость управляющего напряжения Е от периода суперизации Тс в присутствии обнаруживаемого объекта подазана на 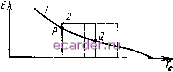 а) Рис. 6.17. Структурная схема дальномера с классическим CP (а) и поясняющие графики (б) рис. 6.17,6 (кривая 2). На этом же рисунке (кривая /) изображена характеристика Тс{Е) для УГС. Точки пересечения Р и Q обоих графиков определяют стационарные состояния системы, одна из них устойчивая (точка Р), другая - неустойчивая (точка Q). При перемещении объекта зависимость Е(Тс) смещается вдоль оси Гс (см. штриховую кривую), одновременно изменяется и положение стационарных точек, что вызывает изменение частоты суперизации. Измерение дальности до объекта осуществляется с помощью измерения периода суперизации. Схема подобного измерения на рис. 6.17,а не показана. В отсутствие обнаруживаемого объекта период суперизации равен Гстах. Режим захвата реализуется в процессе приближения объекта к обнаружителю в момент, когда время запаздывания % становится равным Гстах- Как и адаптивный обнаружитель на основе классического CP, данное устройство обладает адаптивностью по излучаемой мощности, поскольку без объекта мощность вспышек CP мала и определяется лишь внутренними или внешними шумами. Точность измерения дальности оценивается величиной ТиС, где с-скорость света или звука в зависимости от типа обнаружителя; Ти -длительность зондирующего импульса. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 [72] 73 74 75 76 77 78 79 80 81 82 |