
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [24] 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 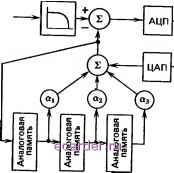 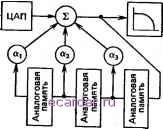 Декодер Кодер Рис. 3.28. Система ДИКМ с тремя порядками предсказания ляется ошибкой предсказания. С этой точки зрения концепцию ДИКМ можно расширить таким образом, чтобы включить в цепь предсказания значения более чем одного предшествующего дискрета. За счет этого дополнительная избыточность, извлекаемая из всех предшествующих дискретов, может быть взрешена и суммирована для получения лучшей оценки значения следующего входного дискрета. В связи с улучшенной оценкой диапазон ошибок предсказания уменьшается, что дает возможность кодировать с меньшим числом разрядов. Для систем с постоянными коэффициентами предсказания большая часть реализуемого выигрыша достигается, когда используются значения только трех последних дискретов. Типовой вариант кодера с линейным предсказанием на основе значений трех последних дискретов, показан на рис. 3.28. В этом варианте применяется аналоговое интегрирование, как показано на рис. 3.27,а для стандартной ДИКМ. Естественно, что возможны также варианты с большей долей цифровой обработки сигнала, как на рис. 3.27,6 и в. Как уже упоминалось в разд. 3.4, при анализе систем с ДИКМ и предсказанием первого порядка обычно получается уменьшение длины кодовой комбинации, соответствующей дискрету, на один разряд по сравнению с ее длиной в системах с ИКМ при эквивалентных показателях систем. В системах с ДИКМ с предсказанием третьего порядка может быть достигнуто уменьшение на 1,5-2 разряда на дискрет [19]. Таким образом, обычная система с ДИКМ может обеспечить то же качество, что и система с ИКМ со скоростью передачи 64 кбит/с, при скорости передачи 56 кбит/с, а в системе с предсказанием третьего порядка можно получить сопоставимое качество при скорости передачи 48 кбит/с. Субъективные измерения, однако, часто показывают, что требуются несколько более высокие скорости передачи, чтобы достичь соответствия качеству ИКМ при скорости передачи 64 кбит/с. Хотя описанные здесь способы ДИКМ могут ощутимо уменьшить скорость передачи, их использование в телефонной связи обще-142 го пользования невелико по двум причинам. Во-первых, ИКМ-си-стемы со скоростью передачи 64 кбит/с завоевали твердые позиции системы, способные обеспечить желаемое качество. Во-вторых, дельта-модуляция, описанная в следующем разделе и представляющая собой особый случай ДИКМ, дает сопоставимое качество и намного проще реализуется. По мере разработки БИС для более сложных алгоритмов кодирования значение различий в реализации будет уменьшаться. 3.5. ДЕЛЬТА-МОДУЛЯЦИЯ Дельта-модуляция (ДМ) представляет собой еще один способ аналого-цифрового преобразования, при котором специальным образом используется корреляция между дискретами в речевом сигнале. Дельта-модуляция фактически может рассматриваться как особый случай ДИКМ, когда используется только один разряд на дискрет разностного сигнала. Этот единственный разряд просто показывает полярность дискрета разностного сигнала и посредством этого указывает на то, увеличился или уменьшился сигнал за время, прошедшее после последнего дискрета. Аппроксимация входного сигнала создается в цепи обратной связи путем формирования ступеньки вверх, если разность положительна (единица), и ступеньки вниз, если разность отрицательна (нуль). При этом входной сигнал кодируется как последовательность подъемов и спусков , напоминающая лестницу. На рис. 3.29 показан типовой сигнал, аппроксимированный посредством ДМ. Отметим, что сигнал в цепи обратной связи продолжает создавать ступеньки в одном направлении, пока значения аппроксимирующего сигнала в два последовательных момента формирования ступенек не окажутся по разные стороны кривой входного сигнала, и в этот момент ступеньки в цепи обратной связи меняют 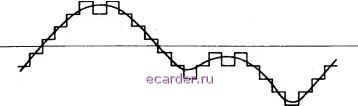 Рис. 3.29. Кодирование сигнала посредством дельта-модуляции В последнее время возрождается интерес к ДИКМ в связи с созданием новых методов, к которым в первую очередь относится ДИКМ с адаптацией коэффициентов предсказания к параметрам кодируемого сигнала. За счет этого снижена требуемая скорость передачи до 32 кбит/с и тем самым удвоено число каналов в типовых цифровых трактах при приемлемом ухудшении качества. В этих методах привлекает то, что все преобразования осуществляются над цифровым сигналом (см. рекомендации МККТТ G.721-G.761).-Яргш. перев. свое направление на обратное, до тех пор пока снова не повторится то же явление. Таким образом, в процессе отслеживания входного сигнала выходной сигнал ДМ скачет туда-сюда вокруг входного сигнала, что дает возможность с помощью сглаживающего фильтра правильно восстановить входной сигнал. Поскольку каждый кодированный дискрет содержит относительно малое количество информации (1 бит), системы с ДМ требуют более высокой частоты дикретизации, чем системы с ИКМ или многоразрядной ДИКМ. В действительности, частоту дискретизации необходимо выбирать намного выше минимальной частоты дискретизации, равной удвоенной полосе. С другой точки зрения повышение частоты дискретизации необходимо для лучшего предсказания следующего дискрета. Дельта-модуляция вызывает значительный интерес как метод преобразования в цифровую форму различных видов аналоговых сигналов. Одной из основных положительных черт ДМ является простота. На рис. 3.30 показан типовой вариант реализации кодера и декодера при ДМ. Отметим, что функция аналого-цифрового преобразования осуществляется с помощью простого компаратора. Положительное напряжение разности приводит к формированию I, а отрицательное - к формированию 0. Соответственно функции цифро-аналогового преобразования в цепи обратной связи и в декодере осуществляются с помощью генератора импульсов с двумя полярностями. В простейшей форме интегратор может состоять просто из конденсатора, накапливающего заряды от импульсного генератора. В дополнение к этим очевидным упрощениям реализации дельта-модулятор допускает также использование относительно простых фильтров для ограничения полосы входного сигнала и сглаживания выходного сигнала [20]. Как указывалось в разд. 3.1, спектр, возникающий в процессе дискретизации, состоит из боковых полос гармоник частоты дискретизации, точно отражающих спектр диск-ретизируемого сигнала. Вследствие относительно высокой частоты дискретизации в дельта-модуляторе эти боковые полосы сильно разнесены по частоте, и, следовательно, от помех наложения спектров можно защититься при менее жестких требованиях к характеристикам среза входного фильтра. Входной сигнал Выходной Декодер -uU ° Генератор импулы:ов Кодер Рис. 3.30. Кодер и декодер в системе с дельта-модуляцией 3.5.1. Перегрузка по крутизне При работе дельта-модулятора, как показано на рис. 3.29, кодированный сигнал никогда не отстоит от входного сигнала более, чем на размер шага. Однако иногда дельта-модулятор не в состоянии отслеживать быстрые изменения во входном сигнале и вследствие этого кодированный сигнал может отстать от входного более, чем на размер шага. Когда это случается, говорят, что дельта-модулятор испытывает перегрузку по крутизне. Условия возникновения перегрузки по крутизне показаны на рис. 3.31. Перегрузка по крутизне происходит в основном, когда скорость изменения входного сигнала превышает максимальную скорость изменения, которая может быть получена в цепи обратной связи. Поскольку максимальная скорость изменения в цепи обратной связи просто-напросто равна произведению размера шага на частоту дискретизации, условие перегрузки возникает, если \dxit)/dt\->qfs, (3.12) где X it) - входной сигнал, q - размер шага, - частота дискретизации. При расчете дельта-модулятора обязательно учитывают связь между двумя типами искажений: более или менее случайными шумами квантования, называемыми иногда гранулярным шумом, и шумом перегрузки по крутизне. Как показано на рис. 3.31, для медленно меняющихся сигналов основное значение имеет гранулярный шум, в то время как для быстро меняющихся сигналов - шум перегрузки по крутизне. Очевидно, что гранулярный шум мал, если малы размеры шагов, но при этом увеличивается вероятность перегрузки по крутизне. Оптимальные в смысле минимизации суммы фанулярного шума и шума перегрузки по крутизне размеры шагов были рассмотрены Эбейтом [21]. Влияние перегрузки по крутизне на качество восприятия речевого сигнала существенно отличается от воздействия гранулярного шума. Как показано на рис. 3.31, шум перегрузки по крутизне достигает пиковых значений непосредственно перед тем, как достигает максимумов кодируемый сигнал. Отсюда шум перегрузки по крутизне имеет значительные составляющие, идентичные по частоте и близкие по фазе основным компонентам входного сигнала. Шумы, связанные Перегрузка по крутизне 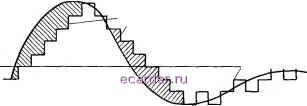 Гранулярный шум Рис. 3.31. Перегрузка по крутизне и гранулярный шум в системе с дельта-модуляцией таким образом с речевым сигналом, эффективно маскируются энергией речи и поэтому менее заметны, чем некоррелированные шумы. И действительно, шум перегрузки намного менее заметен для слушателя, чем случайный, или гранулярный шум при эквивалентном уровне мощности [22]. Следовательно, с точки зрения качества восприятия речи трудно определить оптимальное соотношение гранулярного шума и шума перегрузки по крутизне. Перегрузка по крутизне является не только ограничивающим фактором для системы с дельта-модуляцией, но и проблемой, присущей любой системе, такой как система с ДИКМ в общем случае, когда кодируется разность значений соседних дискретов. Система, оперирующая разностью, кодирует крутизну входного сигнала конечным числом разрядов и имеет, следовательно, конечный диапазон. Если крутизна превышает этот диапазон, происходит перегрузка по крутизне. В противоположность этому в обычной системе с ИКМ ограничена не скорость изменения входного сигнала, а максимальная кодируемая амплитуда. Отметим, что дифференциальная система может кодировать сигналы с произвольно большими амплитудами, лишь бы эти большие амплитуды достигались постепенно. 3.5.2. Линейная дельта-модуляция В наиболее простом дельта-модуляторе используются шаги постоянного размера для всех уровней сигнала, поэтому он называется равномерным, или линейным дельта-модулятором. Расчет линейного дельта-модулятора в основном связан с выбором размера постоянного шага и частоты дискретизации и направлен на удовлетворение двух критериев. Во-первых, отношение сигнал-гранулярный шум должно иметь определенное минимальное значение при наиболее низком уровне кодируемого сигнала. Во-вторых, отношение сигнал-шум перегрузки по крутизне должно иметь некое минимальное значение для самого высокого уровня сигнала, подлежащего кодированию. Для удовлетворения критерия, связанного с перегрузкой по крутизне, удобно использовать выражение (3.12) и рассчитывать систему таким образом, чтобы перегрузка по крутизне наступала как раз на границе самого высокого уровня входного сигнала. Вследствие этого размер шага для самого большого уровня сигнала не является оптимальным в смысле качества восприятия или даже в смысле минимизации суммы гранулярного шума и шума перегрузки. Однако, когда имеется только гранулярный шум, характеристика ОСШК для дельта-модулятора может быть соответствующим образом сопоставлена с характеристикой ОСШК системы с ИКМ. Сопоставление этих двух методов кодирования при других условиях, например, тогда когда происходит перегрузка в любой из этих систем, требует оценки слушателями. Уровень ожидаемой энергии от одиночной (без перегрузки) ошибки квантования в системе с дельта-модуляцией определяется из выражения (3.2) как д/12 где q - размер шага. Однако вследствие относительно высокой частоты дискретизации в системе с ДМ спектр ошибок квантования занимает более широкую полосу, чем в системе с ИКМ. Благодаря этому выходной фильтр ДМ-декодера подавляет более высокий процент шума квантования, чем выходной фильтр ИКМ-декодера. Для частот дискретизации, которые более чем в б раз превышают максимальную частоту входного фильтра, шум квантования на выходе, по существу, пропорционален отношению частоты среза фильтра к частоте дискретизации. Вследствие этого мощность шума квантования линейного дельта-модулятора может быть аппроксимирована следующим образом: Мощность шума квантования линейной ДМ = iKfJfg) q, (3.13) где fc - частота среза выходного фильтра, - частота дискретизации, q - размер шага, К=0,Ъ2. Величина К в формуле (3.13) определялась многочисленными исследователями, получившими такие значения, как 0,18 [23]; 0,32 [24]; 0,51 [25] и 0,67 [26]. Нами выбрано значение 0,32, поскольку оно чаще всего используется и является исходным значением, полученным де Ягером в его основополагающей работе в области дельта-модуляции [24]. Было предложено множество разновидностей дельта-модуляторов, что привело к появлению множества других шфажений для мощности шума квантования. Если в качестве входного использовать синусоидальный сигнал с частотой /, то можно объединить выражения (3.12) и (3.13) и получить для отношения сигнал-шум квантования линейного дельта-модулятора следующее обычно используемое выражение: ОСШК = (АУ2) I [ iKfJig) i2nfA/fg) 2], (3.14) где в качестве входного сигнала принята синусоида Asin2nft, а размер шага выбран так, чтобы предотвратить перегрузку по крутизне [см. (3.12)]. При пользовании выражением (3.14) не. следует забывать некоторые важные предположения, принятые при его выводе. Во-первых, выражение (3.14) относится только к гранулярному шуму. Во-вторых, размеры шагов в этом выражении подогнаны к перегрузке по крутизне для конкретного синусоидального входного сигнала. Если размер шага согласно выражению (3.14) используется для входного сигнала с той же амплитудой, но с более высокой частотой, наступит перегрузка по крутизне. Кроме того, для сигналов с пониженными уровнями получается меньшее ОСШК, если шаг имеет тот же размер. Наиболее обманчивый аспект формулы (3.14) состоит в том, что из нее следует, будто линейный дельта-модулятор дает более высокое значение ОСШК для низкочастотных сигналов, чем для высокочастотных. Это предположение справедливо, если размер шага подстроен под меньшую величину низкочастотного сигнала. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [24] 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |