
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [25] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 g 30 Частота входного сигнала. Гц 400 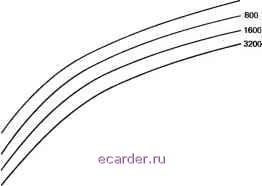 20 30 40 50 Частота дискретизации, кГц Рис. 3.32. Отношение сигнал-шум квантования при линейной дельта-модуляции; частота среза выходного фильтра равна 3,4 кГц Зависимость (3.14) отображена на рис. 3.32 для различных частот входного сигнала. Отметим, что ОСШК улучшается на 9 дБ на октаву (удвоение) частоты дискретизации. В отличие от этого в системе с ИКМ ОСШК улучшается на б дБ с каждым добавочным разрядом. Вследствие этого системы с ИКМ дают лучшее качество при высоких скоростях передачи, а дельта-модуляторы - при низких скоростях передачи около 40 кбит/с. При использовании синусоидального колебания с частотой 800 Гц в качестве испытательного сигнала из выражения (3.14) определяем (это же показывает и рис. 3.32), что для получения ОСШК, равного 26 дБ при линейной дельта-модуляции требуется частота дискретизации порядка 28 кГц. Соответствующую скорость передачи порядка 28 кбит/с следует сопоставить с четырьмя разрядами на дискрет, или со скоростью передачи 32 кбит/с линейной системы с ИКМ, для которой ранее было вычислено то же самое ОСШК. Выражение (3.14) определяет ОСШК для синусоидального сигнала с постоянной амплитудой. Следующее соотношение определяет частоту дискретизации (скорость передачи), необходимую для получения конкретного ОСШК, и содержит также коэффициент динамического диапазона R: /,= (25i?f/c- OCШK) (3.15) где R - динамический диапазон {Аах/Атт) / - частота входного сигнала, - частота среза выходного фильтра, ОСШК - требуемое минимальное значение отношения сигнал-шум квантования. Выражение (3.15) справедливо при предложений, что размер шага выбран исходя из отсутствия перегрузки по крутизне для сигнала с наивысшим уровнем: 9=2лЛиах( /х)- (3.16) Отметим снова, что выражения (3.15) и (3.16) соответствуют расчету дельта-модулятора с большим запасом, поскольку они не допускают перегрузки по крутизне. Однако они полезны, так как согласуются с расчетом ИКМ без перегрузки, представленным ранее. Пример 3.5. Используя синусоидальное колебание с частотой 800 Гц в качестве входного сигнала, определите размер шага и частоту дискретизации в линейном дельта-модуляторе, необходимые для получения при кодировании речи ОСШК, равного 398 (26 дБ), и динамического диапазона порядка 1000 (30 дБ). Предположим,.что частота среза выходного фильтра равна 3,4 кГц. Решение. Формулы (3.15) и (3.16) дают соответственно следующие значения для частоты дискретизации и размера шага: / S = л/25- 1000 - 800- 3400 - 398 = 279 кГц; Я = 2кА,- 800/279 ООО = 0,018А , = 0,56Л ) . Скорость передачи 279 кбнт/с следует сопоставить с 9 разрядами на дискрет и скоростью передачи 72 кбит/с, полученной ранее для ИКМ с равномерным шагом. Размер шага, полученный в примере 3.5, достаточен лишь для того, чтобы только-только предотвратить перегрузку при максимальном уровне входного сигнала с частотой 800 Гц. Вследствие этого сигнал с более высокой частотой и той же амплитудой вызовет перегрузку кодера. Оценка усредненного спектра речи на рис. 3.24 показывает, однако, что частота 800 Гц находится вблизи частот составляющих с максимальной амплитудой, а на более высоких частотах в среднем мощность значительно меньше. Вследствие этого единственный размер шага приблизительно подходит для передачи всего диапазона частот без перегрузки по крутизне. И действительно, на рис. 3.24 показано, что амплитуда составляющей с частотой порядка 2400 Гц обычно снижается примерно в 5,6 раза (на 15 дБ), в то время как требуется снизить ее только в 3 раза, чтобы получить крутизну меньше крутизны сигнала с частотой 800 Гц. Отсюда входной сигнал с частотой 800 Гц с достаточной точностью определяет размер шага, необходимый для исключения перегрузки по крутизне. Довольно неожиданным результатом, полученным в примере 3.5, является относительно грубый шаг (0,56 Лш). используемый для кодирования синусоидального сигнала с минимальной амплитудой. Несмотря на это, дельта-модулятор дает ОСШК, равное 26 дБ, вследствие удаления входным фильтром большой части шумов квантования . На рис. 3.33 изображена часть грубо закоди- Как будет показано далее, практические соображения при реализации этого кодера приводят к чрезмерному уровню шумов незагруженного канала. Среднее значение за короткий период времени \ 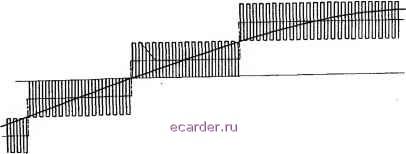 Рис. 3.33. Синусоидальный сигнал с частотой 800 Гц, кодируемый посредством дельта-модуляции с частотой дискретизации 279 кГц рованной синусоиды с частотой 800 Гц при использовании частоты дискретизации и размера шага, полученных в примере 3.5. Показано также среднее за короткий период времени значение кодированного сигнала, которое для всех практических целей является эквивалентным входным сигналом для выходного фильтра. Отметим, что высокая частота дискретизации дает очень тонкое разрешение для момента времени, когда сигнал пересекает границу квантования. Таким образом, дельта-модулятор кодирует сигнал с грубым квантованием по амплитуде, но с тонким квантованием по времени. В противоположность этому в системе с ИКМ используется относительно тонкое разрешение по амплитуде, но грубое квантование по времени. Основной недостаток линейной дельта-модуляции, подобно ИКМ с равномерным шагом, состоит в том, что сигналы и с низким и высоким уровнями кодируются шагом одного и того же размера. Вследствие этого сигналы с высоким уровнем кодируются с избыточным качеством, что приводит к повышению скорости передачи. Решение, естественно, состоит в том, чтобы изменять размер шага в какой-то зависимости от крутизны входного сигнала. Обычно размер шага подстраивается постепенно в соответствии с усредненным за короткое время значением крутизны сигнала. При реализации дельта-модулятора большое значение имеет поддержание в кодере и декодере равенства шагов в положительную и отрицательную сторону. Если размеры шагов различаются в декодере, то в восстановленном сигнале накапливается смещение за счет постоянной составляющей, что может привести к насыщению цепей. Как будет показано в следующем разделе, с небольшим различием размеров шагов в декодере можно сравнительно легко примириться. В то же время различие размеров шагов в кодере доставляет больше неприятностей и требует пристального внимания. Когда в дельта-модуляторе кодируется сигнал незагруженного канала (пауза речи), выходной цифровой сигнал с идеальной точностью меняется между О и 1. Если происходит именно такое изменение, выходной фильтр декодера устраняет относительно
Отфильтрованный выходной сигнал Рис. 3.34. Различие между размерами шагов в положительную и отрицательную стороны в дельта-модуляторе при отсутствии входного сигнала высокочастотные шумы дискретизации. Однако, если размеры шагов различаются, как показано на рис. 3.34, то случайно могут появиться две последовательные единицы или два последовательных нуля. Поскольку пары нулей или единиц появляются относительно редко, они создают низкочастотные искажения, которые не отфильтровываются и проявляются в виде шумов незагруженного канала. Шумы незагруженного канала представляют особую проблему при разработке дельта-модуляторов из-за относительно больших шагов квантования (см. пример 3.5). Одним из средств балансировки размеров шагов в кодере является вычитание смещения, получаемого низкочастотной фильтрацией (интегрированием) сигнала в цепи обратной связи в течение длительного периода времени [20]. 3.5.3. Слоговое компандирование Существенным свойством методов компандирования, описанных для систем с ИКМ, является то, что они рассчитаны на мгновенный охват всего динамического диапазона кодера в течение каждого дискрета. Вследствие этого компандирование по законамjvi и А иногда называют мгновенным. Однако, как уже упоминалось, в речевом сигнале имеется избыточность в уровне мощности, проявляющаяся в том, что в течение ста или более дискретов, взятых с частотой 8 кГц, уровень мощности остается относительно постоянным. Благодаря этому адаптивная регулировка усиления обеспечивает более эффективное кодирование, чем мгновенное компандирование. Если адаптация регулировки усиления системы имеет периодический характер, который в определенной степени соответствует частоте генерации слогов, то ее называют слоговым компандированием. Слоговое компандирование первоначально было разработано для снижения уровня шумов незагруженного канала при использовании в шумящих аналоговых каналах [27]. Как показано на рис. 3.35, уровень мощности слогов с малым уровнем увеличивается (сжатие динамического диапазона) на передающей стороне и уменьшается (расширение динамического диапазона) на приемной. В процессе ослабления принятого сигнала восстанавливаются до своего первоначального уровня слоги с малой мощностью, но также вносится затухание в любые шумы, возникающие в линии передачи. Благодаря этому для сигналов с низким уровнем улучшается отношение сигнала Уровень мощности входного сигнала, дБм Уровень мощности выходного сигнала, дБм 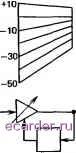 +7,5 Передаваемый уровень, дБм -22,5 Компрессирование Переменное усиление  Переменное -затухание Измерение мощности Измерение мощности Рис. 3.35. Слоговое компандирование аналогового сигнала К шумам линии передачи. Усиление на передающей стороне зависит от уровня мощности сигнала за небольшой период времени (длительность слога). Аналогично этому компенсирующее затухание, вводимое в приемном полукомплекте, определяется уровнем мощности принятого сигнала за небольшой промежуток времени. Слоговое компандирование в цифровых системах приводит к такому же улучшению отношения сигнал-шум квантования, как и в шумящих аналоговых линиях передачи. Если цифровые кодеры и декодеры рассматривать как часть линии передачи, то процесс усиления сигналов низкого уровня перед кодированием и ослабления их после декодирования существенно уменьшает шум квантования без внесения изменения в уровень сигнала. На практике при слоговом компандировании в том виде, как оно реализовано в оконечных устройствах цифрового преобразования речи, сигнал не усиливается на передающей стороне и не ослабляется на приемной. Вместо этого используется эквивалентный процесс управления размерами шагов в кодере и декодере. Для передаваемого цифрового потока безразлично, усиливается ли сигнал и кодируется с постоянными размерами шагов квантования или он остается неизменным, но кодируется с меньшими шагами квантования. Таким образом, слоговые компандеры в оконечных устройствах цифрового преобразования речи обычно уменьшают размеры шагов квантования при кодировании и декодировании слогов с малой мощностью, но увеличивают размеры шагов квантования для слогов с большой мощностью. Хотя слоговое компандирование можно использовать в сочетании с любым типом кодера речевого сигнала, этот способ чаще всего применяется в дифференциальных системах вообще и в системах с дельта-модуляцией в частности. Во многих применениях время адаптации уменьшается до 5 или 10 мс, что несколько меньше длительности типового слога (приблизительно 30 мс). Однако этот метод все еще продолжают называть слоговым компандированием, чтобы отличить его от мгновенного. Для подстройки размера шага в декодере в соответствии с подстройкой его в кодере необходимо реализовать некоторые мероприятия для передачи информации о размере шага с передающей стороны на приемную. Один из методов состоит в передаче информации о размере шага в явной форме как дополнительной информации [16]. Как уже упоминалось при рассмотрении прямой регулировки усиления, этот метод имеет ряд недостатков. В общем случае более эффективный подход состоит в извлечении информации о размере шага из передаваемого цифрового потока. Вследствие этого при отсутствии ошибок в канале декодер и цепь обратной связи в кодере оперируют одной и той же информацией. Эта процедура аналогична той, которая используется в аналоговых системах со слоговым компандированием, где требования к вносимому приемным полукомплектом затуханию определяются уровнем мощности принятого сигнала за небольшой период времени. В цифровом сигнале содержатся определенные комбинации символов, которые отражают крутизну закодированного сигнала. Выделение информации о большой крутизне приводит к увеличению размера шага, а информации о малой крутизне - к его уменьшению. Получение информации о размере шага из переданного цифрового потока позволяет преодолеть основные недостатки вспомогательного кодирования, упомянутого ранее Следует особо отметить, что поскольку явная передача информации о размере шага отсутствует, передача информации дискретизированной речи никогда не прерьшается и частота дискретизации речи равна скорости передачи. В цифровом потоке не надо также образовывать циклы для отделения информации о размере шага от результатов кодирования сигнала. Кроме того, если подстройка размеров шага осуществляется плавно, то отдельные приращения достаточно малы, так что случайные ошибочные подстройки на приемной стороне, вызванные ошибками в канале, не являются критичными. Однако в линиях передачи с очень высоким коэффициентом ошибок (порядка одной ошибки на сотню битов) лучшее качество декодированной речи может быть получено, если информация о размере шага передается в явной форме и ее избыточность используется для коррекции ошибок [28]. 3.5.4. Адаптивная дельта-модуляция Многочисленные исследователи предложили и изучили большое число различных алгоритмов адаптации размера шага в дельта-модуляторе. В основном все алгоритмы увеличивают размер шага, когда устанавливается начало перегрузки по крутизне, и уменьшают размер шага при уменьшении крутизны входного сигнала. В некоторых из алгоритмов непосредственно изменяется крутизна входного сигнала и передается информация о размере шага в явной форме. В других алгоритмах информация о размере шага и в кодере и в декодере извлекается из передаваемого цифрового потока. Адаптация иногда является мгновенной, при которой подстройки осуществляются при переходе от одного дискрета к другому [16], но гораздо 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [25] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
||||||||||||||||||||