
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 отдельных сигналов с использованием заранее установленных временных соотношений таким образом, чтобы приемное оконечное устройство могло опознавать каждый дискретный сигнал по мере егс поступления. Установление соответствующей временной базы на приеме всегда требует большей пропускной способности тракта передачи, чем та, которая необходима для передачи собственно цифровой информации. На относительно коротких расстояниях (в пределах коммутационной станции или вычислительного комплекса) хронирующая информация (тактовая частота) обычно распространяется отдельно от сигналов, несущих информацию. Однако на больших расстояниях более экономично вводить хронирующую информацию в формат самого цифрового сигнала. В любом случае для передачи хронирующей информации требуется увеличить пропускную способность канала (полоса, скорость передачи или кодовое пространство). В этой главе рассматриваются наиболее распространенные способы передачи цифровых сигналов в проводных системах. Соответственно предмет этой главы часто называют преобразованием к коду передачи. Рассматриваемые методы в общем случае можно использовать в любой системе связи, в которой передача цифровых сигналов осуществляется непосредственно в форме импульсов (такой, как коаксиальный кабель или световод ). Тот факт, что при этих способах спектр передаваемых сигналов содержит и низкочастотные компоненты, приводит к тому, что их называют также системами передачи в основной полосе частот или системами передачи импульсами постоянного тока. В гл. 6 будут рассмотрены системы передачи в определенной полосе частот, а именно, радиосистемы, которые требуют модуляции и передачи с несущей частотой. При последующем рассмотрении внимание концентрируется на системах и прикладных вопросах цифровой передачи. Деталям анализа систем передачи импульсов внимание не уделяется, поскольку материал такого характера имеется во всех трудах по теории цифровой связи (см. список литературы). Некоторые принципы построения систем передачи импульсов представлены в приложении В, где выводятся многие из соотношений, используемых в этой главе. 4.1. ПЕРЕДАЧА ИМПУЛЬСОВ Все цифровые системы передачи разрабатывают исходя из некоторой конкретной формы импульса. Даже системы с несущей должны в конечном итоге создавать импульс определенной формы на входе решающего устройства приемника. В качестве первого шага рассмотрим идеальный прямоугольный импульс, показанный на рис. 4.1. Спектр, соответствующий прямоугольному импульсу, полу- Рис. 4.1. Прямоугольный импульс Фактически передача по световоду является передачей с несущей, в роли которой выступает световое колебание. При этом передача производится в определенной полосе частот, не захватывающей низкие частоты, определяемые формой импульса.- Прим. перев. т т 2 1 Время чен в приложении А и представлен на рис. 4.2. Его обычно называют характеристикой вида (sinx) /х: F(a))=r(sina)r/2)/(a)T/2), (4.1) где (1)=2л/ - круговая частота, а Т - длительность импульса. Отметим, что на рис. 4.2 также представлена доля общей энергии спектра, заключенная в различных полосах. Как здесь показано, в пределах спектра до первого нуля на частоте f=l/T содержится 90% энергии сигнала. Значительная доля энергии в пределах этой полосы указывает на то, что полоса сигнала может быть ограничена значением 1/Т и несмотря на это идеальная форма сигнала будет хорошо аппроксимироваться. Согласно теории, если необходимо сохранить только значения отсчетов в середине каждого тактового интервала сигнала, то полосу можно сократить до 1/2Т. Исходя из этого факта, максимальнгш скорость передачи сигнала в определенной полосе R = 2BW, (4.2) где R - скорость передачи сигнала (равна 1 /Т), а BW - ширина полосы. Выражение (4.2) представляет собой фундаментальный вывод из теории связи: максимальная скорость передачи сигнала, достижимая при передаче в полосе низких частот при отсутствии межсимвольной интерференции, численно в 2 раза больше ширины полосы. Эту скорость передачи i?max иногда называют скоростью передачи по Найквисту . Хотя дискретные прямоугольные импульсы наиболее просты для визуального представления, прямоугольная форма требует широкой
1/Г 2/Г 3/Г Частота, Гц Рис. 4.2. Спектр прямоугольного импульса длительностью Т fit) 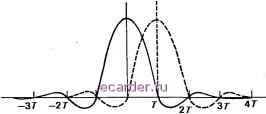 Время-*r Рис. 4.3. Типичная импульсная реакция канала с ограниченной полосой полосы и поэтому нежелательна. Более типичная форма одиночного импульса показана на рис. 4.3. Колебания по обе стороны от основной части импульса (звон) являются неизбежным следствием ограниченной полосы канала. Обычно в цифровую линию подаются прямоугольные импульсы (или их модулированные эквиваленты), но сочетание фильтров, ограничивающих полосу, и самой среды передачи приводит к реакции, аналогичной показанной на рисунке. На рис. 4.3 дан выходной импульс в отрицательном времени, так что центр импульса соответствует t=0. В действительности длительность колебаний перед импульсом определяется задержками в фильтрах и корректорах. Важным свойством импульсной реакции, показанной на рис. 4.3, является то, что несмотря на наличие колебаний, импульсы могут передаваться каждые Т секунд и приниматься без помех от соседних импульсов. Очевидно, что моменты принятия решения должны совпадать с моментами пересечения нуля соседними импульсами. Импульсные реакции, подобные показанным на рис. 4.3, можно получить в канале с полосой, приближающейся к минимальной (по Найкви-сту), равной численно половине скорости передачи сигнала. Более детальный анализ передачи импульсов дан в приложении В. Межсимвольная интерференция. По мере приближения скорости передачи в цифровой линии к максимальной скорости для данной полосы все более критичными становятся положения моментов принятия решения и все более жесткими требования, предъявляемые к расчету канала. Небольшие отклонения в реакции канала или в положениях моментов принятия решения приводят к перекрытию импульсов в эти моменты, называемому межсимвольной интерференцией. К основным причинам возникновения межсимвольной интерференции относятся: 1) неточности хронирования; 2) недостаточная ширина полосы; 3) амплитудные искажения; 4) фазовые искажения. Неточности хронирования. Неточности хронирования на передаче или приеме создают межсимвольные искажения. На передаче происходит, если скорость передачи не согласована с частотой зна, рассчитанной для канала. Неточности хронирования несу-ственны, если при передаче сигналов со скоростью R в фильтре реализуется чрезвычайно крутой срез. Поскольку в приемнике хронирующее колебание извлекается принимаемого сигнала, подверженного шумам и, возможно, иска-гниям, неточности в положениях моментов принятия решения здесь нее вероятны, чем неточности хронирования в передатчике. Если корость передачи существенно ниже /?шах> чувствительность к ошиб-хронирования мала (т. е. если скорость передачи численно равна рине полосы канала или меньше ее, а не равна теоретически мак-лальной скорости, соответствующей удвоенному значению ширины яосы (см. приложение В). Недостаточная ширина полосы. Частота колебаний, показанных рис. 4.3, точно равна теоретически минимальной ширине полосы яала. Если ширину полосы уменьшать и далее, частота колебаний еньшается и в обязательном порядке возникает межсимвольная рференция. В некоторых системах сигнал преднамеренно передают со ско-стью, превышающей /? ,а но это делается при заранее предусмот-яных значениях межсимвольной интерференции, на которую рас-ятывается приемник. Обычно такие системы называют системами частичным откликом - это название связано с тем, что канал не левает полностью отреагировать на входной сигнал за время оди-;ОЧного импульса. Наиболее распространенные виды систем с частичным откликом рассматриваются в последующих разделах. Амплитудные искажения. В цифровых системах передачи всегда Требуются фильтры для ограничения полос передаваемых сигналов, % также шумов и помех в приемниках. В общем случае фильтры рассчитаны на получение определенной импульсной реакции. Когда используется среда передачи с заранее определенными характеристиками, эти характеристики могут быть включены в общий расчет 1льтра. Однако частотная характеристика канала не всегда может гаита> предсказана с достаточной точностью. Отклонение частотной ийрактеристики от требуемой приводит к искажениям импульсов во 1феменной области (уменьшение амплитуд и изменение частоты звонка). Компенсацию неоднородностей частотной характеристики ка-иада называют частотной коррекцией. Фазовые искажения. В частотной области импульс представляет собой суперпозицию частотных составляющих с определенными амплитудными и фазовыми соотношениями. Изменение относительных амплитуд частотных составляющих приводит к амплитудным искажениям, которые уже рассматривались. При изменении фазовых соотношений между составляющими появляются фазовые искажения. В основном фазовые искажения возникают, если частотные составляющие сигнала получают в линии передачи задержки различной величины (см. гл. 1). Хорошим пособием по коррекции, включающим описание автоматического корректора для передачи данных, является работа [1]. 4.2. АСИНХРОННАЯ И СИНХРОННАЯ ПЕРЕДАЧА Имеется два основных вида передачи цифровых сигналов, приводящих к двум фундаментально отличающимся способам установки временной базы (тактовой частоты для определения моментов принятия решения) в приемном оконечном устройстве цифровой линии. Первым из этих способов является асинхронная передача, которая состоит в раздельной передаче групп битов или знаков. Внутри отдельной группы для каждого отдельного сигнала используется специальный, определенный заранее временной интервал. Однако моменты передачи групп друг с другом не связаны. Поэтому в приемном оконечном устройстве для приема каждой группы тактовая частота устанавливается заново. При втором способе, называемом синхронной передачей, цифровые сигналы посылаются непрерывно с постоянной скоростью. В этом случае приемное оконечное устройство должно сформировать и поддерживать колебание с тактовой частотой, которое синхронизируется с входящим цифровым сигналом в течение неограниченного периода времени. 4.2.1. Асинхронная передача Между периодами передачи асинхронная линия находится в неактивном, или незагруженном состоянии. Начало каждой группы передачи обозначается стартовым битом. Ширина стартового импульса на приеме измеряется и определяется его середина. Отсчеты импульсов последующих информационных битов берутся с номинальной частотой, начиная от середины интервала второго бита. После информационных битов передается один или большее число стоповых битов, что позволяет линии вернуться в неактивное состояние . На рис. 4.4 показан асинхронный вид работы, используемый обычно для низкоскоростной передачи данных. Как показано на рис. 4.4, обнаружение каждого бита информации выполняется путем взятия идеального отсчета входного сиг-гала в середине каждого сигнального интервала. На практике моменты взятия отсчетов отклоняются от идеального положения на величину, зависящую от степени изменения формы стартового импульса шумами и искажениями. Поскольку моменты взятия отсчетов для каждого информационного бита определяются на базе единственного стартового бита, асинхронные системы плохо работают при высоких уровнях шумов. Конечно, можно было бы использовать более одного стартового бита для улучшения точности определения начальной фазы колебания тактовой частоты, но это усложнило бы приемник и потребовало бы введения дополнительной избыточности для передачи хронирующей информации. Первоначально стоповые биты вводились, чтобы дать электромеханическому оборудованию достаточно времени для установки фазы перед поступлением следующего знака. При электронном оборудовании единственная цель введения стоповых битов состоит в том, чтобы позволить стартовому биту всегда быть бестоковой посылкой (логическим нулем). Стартовые биты Стоповые биты Переданный сигнал Сигнал на приеме Идеальные моменты отсчета для каждого зака, состоящего из восьми битов Рис. 4.4. Асинхронная передача Ошибки хронирования возникают также, если номинальное значение тактовой частоты в приемнике численно отличается от номинального значения скорости передачи в передающем устройстве. Даже если стартовый бит дает возможность определить правильную начальную фазу колебания тактовой частоты, смещение тактовой частоты приемника вызывает сдвиг каждого последовательного момента взятия отсчета все далее от центра соответствующих сигнальных интервалов. Поскольку использование самого термина асинхронный подразумевает наличие автономного генератора в приемнике, определенный сдвиг неизбежен во всех асинхронных системах. Максимальная длительность каждой группы символов или знака определяется предельными значениями неточностей определения первоначальной фазы и максимальной ожидаемой разности частот генераторов передатчика и приемника. Основной привлекательной чертой асинхронной передачи является простота определения моментов взятия отсчетов сигнала в приемнике. В дополнение к этому асинхронная передача является по своему существу гибкой с точки зрения работоспособности системы в диапазоне средних скоростей передачи данных. При высоких скоростях знаки передаются один за другим. Передача автоматически приспосабливается и к пониженным скоростям данных путем увеличения пауз между знаками. В противоположность этому синхронный приемник должен отследить изменение скорости в передатчике, прежде чем он сможет правильно взять отсчеты входного сигнала. Обычно тактовый генератор синхронной системы перестраивается очень медленно и в узком диапазоне. Следовательно, асинхронная система более подходит для тех применений, когда скорость передачи меняется. Системы с синхронной передачей могут выдержать передачу информации с переменной скоростью, но при этом задача подстройки под скорость передачи информации выполняется за счет процессов более высокого уровня (протокола канального уровня), при которых в цифровой поток вводятся кодовые комбинации, соответст- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
|||||||||