
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 [52] 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 системы с 8-ФМ, в которой используются такие фазы сигнала, как на фазовой диаграмме на рис. 6.9. Предполагается, что на фазовой диаграмме повороты совершаются против часовой стрелки, поэтому синусоидальная функция отстает от косинусоидальной на 90°. Большая часть последующего материала этой главы при изложении концепции, анализе и описании реализации различных методов модуляции опирается существенным образом на квадратурные представления сигналов. Способы реализации модулятора. Возможен ряд способов реализации модуляторов ФМ. Как уже упоминалось при рассмотрении модуляции вида 2-ФМ, работа соответствующего модулятора может быть основана на простом инвертировании колебания несущей (умножения на -1) для логического нуля и отсутствия инвертирования - для логической единицы. Ниже перечислены некоторые из основных способов, используемых для получения сигналов с многоуровневой ФМ: 1. Синтез требуемой формы сигнала с использованием цифровой обработки сигнала на удобных достаточно низких несущих частотах (как в модемах для работы по каналам ТЧ). 2. Формирование множества фаз из единственной несущей и выбор между фазами в зависимости от значений цифрового сигнала. 3. Использование управляемых задержек, выбираемых в соответствии, с требуемыми сдвигами фазы с помощью переключающего устройства. Задержки часто используются и для получения отдельных сигналов методом 2. 4. Получение ФМ сигналов как линейных комбинаций квадратурных сигналов. Ни один из упомянутых способов не дает прямого воплощения многоуровневой ФМ в соответствии с формулой (6.8). Для этого воплощения необходимо устройство, которое формирует фазовые сдвиги в колебании несущей, прямо пропорциональные уровням модулирующего сигнала m (t). За исключением случая 2-ФМ, где для получения сдвига фаз, равного ±180°, можно использовать умножитель, таких устройств не существует. 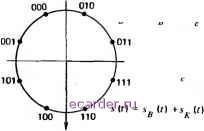 X sin f sin oj t
Рис. 6.10. Получение сигналов с 8-ФМ путем суперпозиции квадратурных сигналов, модулированных по амплитуде: Шд = cosq,; Шк = sinij,; ф,- - фаза- на (-м интервале cos 0J t Цифровой сигнал Фазовращатель на 90° Сигнал В, модулированный по амплитуде Формирователь сигнала в виде импульсов ПОСТОЯННОГО тока ФМ сигнал с постоянной огибающей Сигнал К, модулированный по амплитуде Рис. 6.11. Обобщенная структурная схема ФМ-модулятора Получение ФМ сигналов путем прямой модуляции исходным сигналом возможно, если использовать реализацию с квадратурными сигналами, как указано в способе 4. Фактически необходимо создать два многоуровневых сигнала в виде импульсов постоянного тока: один - для сигнала в фазе (В) и один - для сигнала в квадратуре (К). Эти сигналы обозначаются как nis(t) и /п(0 соответственно для сигналов В и К. Уровни, выбранные для этих двух сигналов в виде импульсов постоянного тока, находятся в соответствии с коэффициентами, которые необходимы для представления ФМ сигнала как линейной комбинации сигналов В и К. На рис. 6.10 показано, как сигнал с 8-ФМ, определенный в табл. 6.3, может быть получен путем сложения двух квадратурных сигналов, модулированных по амплитуде. Структурная схема соответствующего устройства представлена на рис. 6.11. Выбор этого конкретного вида модулятора определялся не столько рекомендациями по практической реализации, сколько тем, что он демонстрирует основные концепции модуляции и полезен для анализа требований к спектру передаваемых методом ФМ сигналов. Реализация демодуляторов. Вследствие наличия постоянной огибающей во всех системах с ФМ детектирование должно производиться с помощью местного опорного колебания. Для систем типа 2-ФМ идеальное опорное колебание когерентно с колебанием, представляющим одну из двух возможных фаз. Когда это опорное ко-лебание умножается на сигнал в фазе, образуется положительный выходной сигнал максимальной амплитуды. Когда умножение произ- До этого момента при рассмотрении не учитывались эффекты, возникающие при фильтрации сигналов с постоянной огибающей. Если ФМ сигнал подвергнуть существенной фильтрации, то он не будет иметь постоянной огибающей. Однако, поскольку фильтрация осуществляется уже после устройств, создающих нелинейности в стволе (например, усилителей мощности), эффекта нелинейности, наносящего наибольший ущерб.- расширения спектра - удается избежать. водится на сигнал с противоположной фазой, образуется отрицательный выходной сигнал максимальной амплитуды. Таким образом, в результате 2-ФМ получают характеристики противоположных сигналов, если создано местное когерентное опорное колебание. Процесс демодуляции для 2-ФМ представлен на рис. 6.4 [и описан выражением (6.4)], где в результате процессов умножения (смешивания) и фильтрации эффективно восстанавливается сигнал в виде импульсов постоянного тока m2(t). Комбинацию смесителя и фильтра низких частот, показанную на рис. 6.4, обычно называют фазовым детектором. Результат фазового детектирования математически описывается следующим образом: Ув(0 = низкочастотная часть от [со8((!0сЧ-ф)2со8(!0с<] = = низкочастотная часть от [со8ф--со8фсо52(10с<-sin9sin2wc] = = С08ф, (6.10) где оператор низкочастотная часть от [ ] соответствует функции фильтра низких частот, рассчитанного на удаление членов с частотой, равной удвоенной несущей частоте. При детектировании сигналов, модулированных по методу 2-ФМ, единственный фазовый детектор показывает, находится ли значение фазы принимаемого сигнала ближе к О или к 180°. Полярность сигнала со8ф на выходе фазового детектора непосредственно отображает вьщеленную информацию. Однако в системах с многоуровневой фазовой манипуляцией информация, получаемая с помощью единственного фазового детектора, недостаточна по двум причинам. Во-первых, со8ф не дает информации о том, является ли угол ф положительным или отрицательным. Во-вторых, амплитуда сигнала на выходе фазового детектора пропорциональна как амплитуде принимаемого сигнала, так и со5ф. Следовательно, из амплитуды сигнала на выходе фазового детектора нельзя извлечь никакой информации, пока ее не сопоставили с амплитудой принимаемого сигнала. Обе эти проблемы можно разрешить, если с помощью вторых смесителя и фильтра измерить фазу по отношению к другому опорному колебанию. Как и ожидалось, наилучшие характеристики получаются в том случае, если второе опорное колебание ортогонально по отношению к первому. Если Ув(0 представляет собой сигнал на выходе первого фазового детектора, определенный в формуле (6.10), сигнал на выходе второго фазового детектора имеет вид Ук(0 = низкочастотная часть от [cos ((о+ф) 2sinwc] -sincf. (6.11) Второй фазовый детектор не только разрешает неопределенность между положительной и отрицательной фазой, но также устраняет необходимость в амплитудном эталоне. Все решения могут базироваться на полярности сигнала на выходе фазового детектора, а не на амплитуде. В качестве первого примера рассмотрим детектирование сигналов с 4-ФМ, представленных в табл. 6.2. Отметим, что первый из двух битов равен О, если фазовый угол положителен (л/4 или Зл/4), и равен 1 в противоположном случае. Отсюда первый бит цифрового сигнала полностью определяется полярностью 5тф, т. е. выходным сигналом второго фазового детектора Ук(()-Аналогично, второй бит цифрового сигнала равен 1, если фаза равна ±я/4, и это указывает, что полярность ygft) содержит всю информацию, необходимую для определения второго бита. Основной вариант реализации демодулятора (детектора) сигнала с 4-ФМ показан на рис. 6.12. Чтобы подчеркнуть связь между схемами модулятора и демодулятора, приведена также схема модулятора 4-ФМ. Система с 4-ФМ выбрана специально, так как она широко применяется и дает хорошую основу для описания других способов модуляции. Канал В Цифровой сигнал на входе 1 О 1 1 О 1 О ftFt 1 о 11 Источник колебаний П реобразователь последовательного сигнала в параллельный О 1 О
Сигнал с 4-ФМ Канал К а) Сигнал с 4-ФМ
Источник V когерентных колебаний фазовращатель на90° Получение колебаний тактовой частоты
Цифровой сигнал на выходе 10 11 ~0 Г~0 Преобразователь параллельного сигнала в последовательный Рис. 6.12. Структурные схемы модулятора и демодулятора для четырехуровневой а - модулятор; б - демодулятор (детектор) Важной особенностью системы с 4-ФМ, показанной на рис. 6.12, на которую следует обратить внимание, является то, что, по существу, имеются два раздельных цифровых потока. В модуляторе разделяется входящий цифровой поток, так что биты поочередно поступают то на модулятор в фазе (В), то на модулятор в квадратуре (К). Те же самые биты появляются на выходах соответствующих фазовых детекторов, где они поочередно вводятся в последовательный цифровой поток. Таким образом, по существу, создаются два независимых двоичных ФМ-канала, использующих ортогональные колебания несущих coso),. и sinwf. Эти каналы обычно называют каналами В и К соответственно. Способ создания двух каналов в пределах имеющейся полосы называют иногда квадратурным группообразованием . До тех пор, пока колебания несущих в модуляторе и опорные колебания в демодуляторе являются по-настоящему ортогональными (в приемнике когерентность поддерживается по обоим каналам), каналы В и К не мешают друг другу. Любое отклонение от ортогональности приводит к появлению переходных помех между двумя квадратурными каналами. Переходные помехи возникают также, если в тракте передачи имеются неоткорректированные фазовые искажения. С первого взгляда может показаться, что квадратурное группообразование увеличивает пропускную способность заданной полосы вдвое. Однако следует отметить, что двоичный ФМ сигнал в каждом из квадратурных каналов представляет собой сигнал с двумя боковыми. Следовательно, полоса канала без квадратурного группообразования используется только на 50% по сравнению с системой с одной боковой. Когда используются квадратурные каналы, работа с одной боковой становится невозможной, так как процесс разделения полос разрушает ортогональность двух сигналов. По существу, квадратурное группобразование только компенсирует потерю пропускной способности, вызванную передачей спектра с двумя боковыми. И действительно, некоторые из модуляторов с одной боковой [5] обладают заметным сходством с модулятором квадратурной ФМ, показанным на рис. 6.12. Демодуляция и детектирование в системах с ФМ и большим числом уровней осложняется тем, что использование только двух опорных колебаний не дает простых средств для определения всех битов цифрового сигнала. Имеются два основных метода, с помощью которых могут быть приняты простые решения для определения всех цифровых сигналов. Один из методов состоит во введении большего числа опорных колебаний в приемнике и измерении фазы принимаемого сигнала по отношению к добавочным опорным колебаниям. Второй метод состоит в использовании только двух опорных колебаний и связанных с ними фазовых детекторов и получении результатов всех дополнительных измерений как линейных комбинаций первых двух выходных сигналов. В качестве примера первого метода рассмотрим систему с 8-ФМ (см. табл. 6.3 и рис. 6.9). Для этой системы можно достичь опти- Рис. 6.13. Опорные колебания для детектирования сигнала с 8-ФМ
мального детектирования, если сигналы на выходах двух добавочных фазовых детекторов получать по отношению к опорным колебаниям с фазами --л/4 и -л/4. Эти два новых опорных колебания обозначаются А к Б, как показано на рис. 6.13. Сигналы на выходах четырех фазовых детекторов, соответствующих четырем опорным колебаниям, определяются следующим образом: у,( = низкочастотная часть от [cos ((!0<.(-Ьф) 2sin Wcf] = -БШф; = низкочастотная часть [cos (м-Нф) 2sin (Wr/--n/4)] = = 0,707cosф-0,7078Шф; Уд = низкочастотная часть от [cos (Мс+ф) 2cos ct] = cosф; д, = низкочастотная часть от [cos(Mj+if)2cos(Wct+n/4)] = = 0,707cosф--0.707sinф. (6.12) Для определения подходящей логики решения была произведена оценка этих выражений для каждой из восьми возможных фаз сигнала. Результаты приведены в табл. 6.4. Изучение табл. 6.4 показывает, что первый бит цифрового сигнала равен 1, когда положительно. Аналогично второй бит цифрового сигнала равен I, когда Ув положительно. Третий бит цифрового сигнала равен I, когда и и и положительны или когда все они отрицательны. Следовательно, третий бит цифрового сигнала определяется как логическая комбинация сигналов на выходах фазовых детекторов. Таблица 6.4. Сигналы на выходах фазовых детекторов при восьмиуровневой ФМ
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 [52] 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||