
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [54] 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 Источник колебаний © Фазовращатель наЭО?
Источник когерентных опорных колебаний Модулятор Демодулятор Рис. 6.18. Модулятор-демодулятор КАМ лятора и демодулятора КАМ вместе с изображениями сигналов для случая 16-КАМ. Отметим, что, в отличие от сигнала с ФМ, сигнал с КАМ, показанный на рис. 6.19, не имеет постоянной огибающей. При моду-ЛЯЩ1И типа ФМ постоянная огибающая поддерживается за счет введения ограничений на комбинащ1и уровней в квадратурных каналах. В системе с КАМ комбинащш не ограничиваются, поскольку уровни в каждом канале выбираются независимо. В результате этого системы с КАМ в общем случае нельзя использовать с устройствами, которые могут входить в насыщение. Спектр сигнала системы с КАМ определяется спектрами сигналов в виде импульсов постоянного тока, поступающих в квадратур- 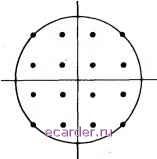 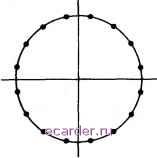 16-КАМ 16-ФМ Рис 6.19. Сопоставление семейств сигналов с 16-КАМ и 16-ФМ ные каналы. Поскольку эти сигналы имеют ту же структуру, что и сигналы в виде импульсов постоянного тока в системах с ФМ, спектр сигналов с КАМ индентичен спектру сигналов с ФМ при равном числе точек сигнала на диаграмме. В частности, форма спектра сигнала с 64-КАМ идентична форме спектра сигнала с 64-ФМ. Несмотря на то, что формы спектров и одинаковы, характеристики ошибок для этих двух систем совершенно различны. При большом числе точек сигнала системы с КАМ всегда имеют лучшие характеристики, чем системы с ФМ. Основная причина этого состоит в том, что расстояние между точками сигнала в системе с ФМ меньше расстояния между точками в сравнимой системе с КАМ. На рис. 6.19 сопоставлено семейство точек сигнала в системе с 16-КАМ с семейством точек сигнала в системе с 16-ФМ при той же самой пиковой мощности. Общее выражение для расстояния между соседними точками сигнала в системе с КАМ с пиковой амплитудой, равной единице, и L уровнями по каждой из осей имеет вид d=l(L-\). (6.18) Из формул (6.16) и (6.18) следует, что п-уровневая система с КАМ имеет преимущество перед п-уровневой системой с ФМ при одном и том же уровне пиковой мощности. А при сопоставлении уровней средней мощности система с КАМ демонстрирует еще большее преимущество. Следующая формула, полученная в приложении В, дает общее выражение для отношения пиковой мощности к средней в системе с КАМ: Пиковая мощность Ь(Ь-1) Средняя мощность l/2 2 2 (2;-1) 1=1 где общее число точек в системе с КАМ равно L . (6.19) Пример 6.1. Определим относительную характеристику ошибок систем с 16-ФМ и 16-КАМ при одной и той же пиковой мощности, а также при одинаковых средних мощностях. Решение. Поскольку эти две системы имеют одинаковое число точек сигнала на диаграмме, они передают сигнал с одной и той же скоростью и требуют одной и той же полосы для этой скорости передачи цифрового сигнала. В соответствии с этим относительная характеристика ошибок полностью определяется относительными расстояниями между точками сигнала. (При использовании различных скоростей надо учитывать влияние различных полос шума в приемниках.) Из формул (6.16) и (6.18) следует, что при дайной пиковой мощности система с 16-КАМ дает выигрыш по сравнению с системой с 16-ФМ, равный 1,64 дБ. Из формулы (6.19) также следует, что в системе с 16-КАМ отношение пиковой мощности к средней равно 2,55 дБ. Поскольку в системах с ФМ отношение пиковой мощности к средней равно единице, преимущество системы с 16-КАМ перед системой с 16-ФМ для равных средних мощностей составляет 4,19 дБ. Теоретическая формула для вероятности ошибок при модуляции типа КАМ, полученная в приложении В, идентична формуле для 699135�402 . 10
18 19 Отношение средней энергии на бит к плотности шума Ejllo. дБ Рис. 6.20. Вероятность ошибки для систем с КАМ вероятности ошибок при многоуровневой передаче импульсами постоянного тока при том же числе уровней. Эта формула использована для получения кривых вероятности ошибки для модуляции типов 4-КАМ, 16-КАМ, 32-КАМ и 64-КАМ (рис. 6.20). В табл. 6.5 проведено сопоставление наиболее распространенных методов модуляции цифровыми сигналами, используемых в магистральных СВЧ радиосистемах. Таблица 6.5. Сравнение различных методов модуляции цифровыми сигналами при одинаковых скоростях передачи цифрового сигнала
* Отношение максимального значения мощности установившегося сигнала к средней мощности при случайном цифровом сигнале. Измерено в стволе при распределении характеристик фильтрации иа передаче и приеме по закону квадратного корня. В строгом смысле полоса сигнала для системы с частичным откликом не уже теоретической (по Найквисту) полосы соответствующей системы с полным откликом. Из практических соображений, однако, полоса, требуемая а системах с частичным откликом, уменьшается примерно на 17% [21-*** КЧО - квадратурная передача сигнала с частичным откликом.- Прим. перев. Манипуляция со сдвигом. Вследствие взаимозависимости сигналов в виде импульсов постоянного тока в многоуровневых системах с ФМ переходы сигналов в квадратурных каналах обязательно совпадают. Однако, поскольку в системах с КАМ модуляция в квадратурных каналах осуществляется независимо, в этих системах не обязательно подравнивать тактовые интервалы в обоих каналах. Если тактовые интервалы перекрываются на 50% (рис. 6.21), то этот тип работы называют манипуляцией со сдвигом. Манипуляция со сдвигом обычно используется в системах типа 4-КАМ (чаще называемых системами типа 4-ФМ или системами с квадратурной ФМ). Основное преимущество манипуляции со сдвигом состоит в возможности синх-  Sg (f) = (f 1К COS cj,f X sin to t icosoi t S(f) =5д(0+5.(0 sin CJt 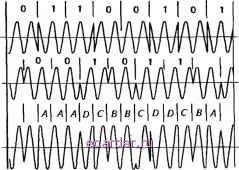 Рис. 6.21. Передача сигналов с 4-ФМ при манипуляции со сдвигом ронизации цепи восстановления опорного колебания от принятой несущей при отношениях сигнал-шум, пониженных по сравнению с их значением в обычных (с выравненными тактовыми интервалами) системах с КАМ или квадратурной ФМ [8, 9]. Представление минимальной манипуляции в виде КАМ. В предшествовавшем рассмотрении систем с КАМ предполагалось использование сигналов в виде импульсов постоянного тока БВН. Более общее представление квадратурной амплитудной модуляции для получения сигнала в виде импульсов постоянного тока допускает использование импульсов произвольной формы. Одной из особенно интересных форм импульса является импульс в виде полусинусоиды A(t) = cos{nt/T), Г/2<<Г/2, (6.20) где Т - длительность тактового интервала. Если в обоих каналах системы с КАМ и манипуляцией со сдвигом используются импульсы в виде полу синусоиды длительностью Т, сигналы в квадратурных каналах p(t) и q(t) могут быть выражены следующим образом: p(t) = agcos () COS0V , Т (6.21) q(t) = agsm-s\n)J, 0t<zT, где ав и - значения цифрового сигнала (±1) для каналов В и К соответственно, cosnt /2Т отражает форму в канале В, а smnt/2T - форму в канале К. (Функция синуса используется для того, чтобы учесть манипуляцию со сдвигом.) Сложив два квадратурных сигнала и применив некоторые тригонометрические тождества, получим: x(t)=p(t)q(t) = aecos (сос*--лГ/2Г;, ав = ак; 22) Ubcos iWct-nt/2T),aB4ак. Формула (6.22), по существу, идентична формуле (б.б), определяющей минимальную манипуляцию. Следовательно, за исключением преобразования логических уровней цифрового сигнала, КАМ со сдвигом и синусоидальной формой импульсов идентична ММ [4, 10]. Это соотношение представлено, кроме того, на рис. 6.22, где показано, как сигнал с ММ получается при модуляции с квадратурными каналами, манипуляции со сдвигом и синусоидальной форме импульсов. Эти результаты показывают, что ММ находится в весьма близкой связи с 4-ФМ при манипуляции со сдвигом. Единственное отличие состоит в использовании для ММ импульсов постоянного тока в форме полусинусоиды, а для 4-ФМ - импульсов прямоугольной формы. Вследствие этой близкой связи интересно сопоставить Сигнал в виде импульсов постоянного тока в канале В: D (f) в Сигнал в виде импульсов постоянного тока -в канале К: D (f) s U) =D(f)-sintof sit) =5(0+5(0- 1 \l/1 0 /1 \ 0 0 I 0 -/1 \ 0 A\/A и fx fi fo f, fi f, f, fo fo fo f, f, f, f, f, c cT f = 2.75/T fi= 3,25/T Рис. 6.22. Передача методом MM сигналов, получаемых посредством КАМ при манипуляции со сдвигом и синусоидальной форме импульсов I -10 -20
Частота, Гц Рис. 6.23. Энергетические спектры сигналов с ММ и 4-ФМ: Скорость передачи символов на квадратурный канал соответствует 1/Г; скорость передачи в обеих системах соответствует 2/7 . Пунктиром показана доля энергии за пределами полосы спектры двух систем (рис. 6.23). Как показано на рисунке, спектр сигнала с ММ имеет первый нуль на частоте, на 50% большей, чем частота, где расположен первый нуль сигнала с 4-ФМ. За исключением этого спектр сигнала с ММ является более компактным, чем спектр сигнала с 4-ФМ, и его составляющие существенно меньше на частотах за пределами основного лепестка спектра. По этой причине ММ представляет собой привлекательный способ модуляции там, где желательна постоянная огибающая и небольшая степень (или 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [54] 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||