
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 [55] 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 полное отсутствие) фильтрации. Одно из таких применений - на цифровых линиях спутниковой связи при частотном разделении в стволе [И]. При необходимости использования фильтров на передаче, ММ не имеет особых преимуществ перед 4-ФМ и обычно требует более сложного модулятора. Перед фильтрацией После фильтрации Рис. 6.24. Пространство сигналов при модуляции типа КЧО 6.1.5. Квадратурная амплитудная модуляция с частичным откликом Квадратурная передача с частичным откликом (КЧО) является способом модуляции, который начинает все шире применяться. При обычной реализации [12] модулятор КЧО представляет собой не что иное, как модулятор КАМ, вслед за которым включается узкополосный фильтр, который существенно сужает полосы квадратурных сигналов и создает в каждом канале межсимвольную интерференцию управляемой величины. В наиболее обычном варианте КЧО в каждом канале содержатся два уровня перед фильтрацией и три уровня после нее (см. гл. 4). Эта система, по существу, представляет собой систему типа 4-ФМ с фильтрацией типа частичного отклика для увеличения плотности передачи информации. Как показано на рис. 6.24, в результате такой фильтрации получаются девять точек сигнала из исходных четырех. Аналогично система с частичным откликом типа 16-КАМ с четырьмя уровнями перед фильтрацией в каждом канале имеет семь уровней после фильтрации, а всего 49 точек сигнала. Хотя модуляторы в системе с КЧО могут быть обычными модуляторами КАМ, демодуляторы (детекторы) должны быть изменены для учета дополнительных уровней в сигнале. После демодуляции сигнала процессы распознавания в каждом из каналов становятся независимыми и идентичными процедурам приема сигнала в виде импульсов постоянного тока и с частичным откликом, описанным в гл. 4. На рис. 6.25 сопоставляется система с КЧО и система с квадратурной ФМ (4-ФМ) при равных пиковых мощностях на выходе модуляторов. Однако средние мощности отличаются, так как в системе с частичным откликом полоса сигнала существенно сужается для уменьшения полосы передачи. На практике плотность передачи информации увеличивается примерно на 17% [2]. Как уже указывалось в гл. 4, фильтрация при передаче методом частичного отклика уменьшает вдвое расстояние между точками сигнала, приводя к ухудшению характеристики ошибок. Однако шумовая полоса приемного фильтра при частичном отклике меньше шумовой полосы соответствующей системы с полным откликом, так Ствол с характеристикой типа приподнятый косинус
ухание при филь- I Шумовая aim оавно О дБ W поноса = 1/7-  4-ФМ Затухание грации равно О дЕ (из-за подъемов на краях полосы) Расстояние между соседними точками сигнала = \/2 А Ствол с характеристикой типа косинус кчо
Затухание при фильтрации = 2 дБ
= 2/777 (на 2 дБ уже полосы, равной 1/Т) Рис. 6.25. Сопоставление ciuчем 4-ФМ и КЧО при разных скоростях передачи цифровых сигналов что уменьшение расстояния ошибок частично компенсируется. Для системы фильтров, показанной на рис. 6.25, суммарное ухудшение характеристики вероятности ошибок для системы с КЧО составляет 4 дБ. Отметим, однако, что с учетом мощности в стволе происходит ухудшение только на 2 дБ. 6.2. РАСПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ФИЛЬТРАЦИИ Передающее и приемное оборудование цифровых радиосистем содержит несколько фильтров, которые в той или иной степени ограничивают спектр сигнала. Поскольку сквозная частотная характеристика ствола должна соответствовать определенным требованиям к реакции на импульс постоянного тока, требуемую составную характеристику фильтрации следует распределить между отдельными фильтрами. В обычных условиях можно спроектировать некоторые из фильтров так, чтобы они обеспечили необходимые характеристики и не оказали при этом значительного воздействия на импульсную реакцию ствола. Напртмер, в процессе смешивания создаются сумма и разность частот входных сигналов. При переносе полосы сигнала вверх желательно получение суммы; а при переносе вниз - разности. Обычно нежелательные составляющие могут быть удалены с помощью фильтра, который не оказывает существенного влияния на форму импульса в выходном сигнале. При последующем рассмотрении предполагается, что только два фильтра оказьшают существенное влияние на реакцию на сигнал: один в передатчике и один в приемнике. 6.2.1. Помехи от соседних стволов Основным назначением приемного фильтра в радиостволе является минимизация шума в сигнале, поступающем на детектор. Вторым назначением этого фильтра является удаление энергии соседних радиостволов. Энергию из соседнего ствола, которую не удалось подавить, называют помехой со стороны соседнего ствола. При данном рассмотрении предполагаем, что формы спектров в соседних стволах идентичны требуемой форме спектра. Эту ситуацию отражает рис. 6.26, где изображены сигналы ряда стволов, разделенных по частоте и передающих цифровые сигналы. Сигнал Сигнал , в соседнем Требуемый, в соседнем стволе I сигнал стволе 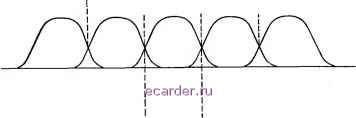 Характеристика фильтра приема I  Помехи от соседнего ствола Рис. 6.26. Помехи от соседних стволов Как показано на рис. 6.26, помехи со стороны соседних стволов возникают вследствие двух явлений. Во-первых, приемный фильтр пропускает нежелательную мощность Pi, поскольку сигнал в соседнем стволе не столь полно ограничен по частоте, чтобы предотвратить его попадание в данный ствол. Второй источник помехи Рг возникает из-за того, что приемный фильтр не обеспечивает бесконечно большого затухания энергии соседнего ствола. Р уменьшается при сужении полосы фильтра передачи, в то время как Рг уменьшается при сужении полосы фильтра приема. Поскольку требования, связанные с импульсной реакцией ствола, ограничивают составную характеристику фильтрации некоторой минимальной шириной, одна из составляюших помехи не может быть уменьшена без увеличения другой. Следовательно, общую характеристику фильтрации каким-то образом следует распределить, чтобы минимизировать суммуР иРг. 6.2.2. Оптимальное распределение Расчет оптимальной фильтрации для каждого конкретного применения может зависеть от ряда факторов, а именно: от установленных норм на излучение, имеющейся элементной базы усилителей мощности, возможности использования перекрестной поляризации для изоляции соседних стволов и относительного влияния шума по сравнению с влиянием помех со стороны соседнего ствола. При отсутствии внешних ограничений классический результат, принадлежащий Зунде [13] и представленный также в [14, 15], определяет оптимальное распределение как такой выбор сигнала на выходе фильтра передачи, при котором этот сигнал соответствовал бы корню квадратному из требуемой характеристики ствола. Отсюда, если требуемый спектр выходного сигнала имеет вид У(ю)=Я р (ю)Нлрв(ы)-(ш), (6.23) где Х(ю) - спектр сигнала на входе ствола; Н р(ы) - частотная характеристика фильтра передачи, Япр (ю) - частотная характеристика фильтра npieMa, то оптимальное распределение соответствует Я р (со)=У(и) ; Я рд(и)= Yiw)yX(w). (6.24) Формула (6.24) определяет частотные характеристики фильтров, при которых минимизируются помехи со стороны соседних стволов, содержащих идентичные сигналы с идентичными уровнями мощности. В дополнение к этому, если спектр сигнала на передаче йпрд(<й)(со) представляет собой величину, комплексно-сопряженную с частотной характеристикой фильтра приема Япр (ю), то фильтр приема согласуется со спектром в стволе и достигается наилучшая из возможных характеристик ошибок по отношению к мощности сигнала в стволе. Распределение частотных характеристик, определенное в формуле (6.24), показано на рис. 6.27 для прямоугольного импульса на входе и реакции типа приподнятый косинус на выходе (см. приложение В). Несмотря на то, что здесь показаны только спектры сигналов в виде импульсов постоянного тока, эту концепцию легко распространить на частотные характеристики полосовых фильтров.
Шум и помехи
Рис. 6.27. Теоретически оптимальная фильтрация при подаче на вход прямоугольных импульсов и получении на выходе реакции типа приподнятый косинус Хотя формула (6.24) и дает прочную теоретическую базу для определения оптимального распределения характеристик фильтрации, практические соображения в конкретных применениях могут привести к отклонениям от оптимума. Одна из проблем, которая возникает в цифровых СВЧ радиосистемах, относится к подъемам на краях полосы фильтров передачи на рис. 6.27. В пассивных фильтрах этот подъем может быть получен только путем внесения затухания в средней части характеристики. Если в качестве компенсации можно поднять мощность на передаче, отрицательного эффекта не будет. Однако уровень мощности на выходе большинства цифровых СВЧ радиосистем ограничен элементной базой усилителей мощности СВЧ диапазона (обычно несколько ватт). Поскольку в этих радиосистемах ограничивающим фактором является мощность устройств, затухание, вводимое в середине полосы, преодолеть невозможно, и, следовательно, оно непосредственно вычитается из уровня принимаемого сигнала. В применениях, где ограничивающим фактором является мощность устройств, оптимальным фильтром передачи представляется фильтр с плоской характеристикой в полосе пропускания. Чтобы получить желательную частотную характеристику ствола на входе детектора, подъем на краях полосы должен быть реализован в фильтре приема. Затухание, вводимое в этой точке ствола, не ухудшает характеристик, поскольку и сигнал и шум ослабляются в равной степени. Однако подъемы на краях полосы создают нежелательный эффект, состоящий в увеличении шумовой полосы приемника и составляющей Pi, т. е. помехи со стороны соседних стволов. Хотя эти увеличения и приводят к ухудшению характеристикам по сравнению с характеристиками при теоретически оптимальном распределении, это ухудшение не столь велико, как при введении затухания, необходимого для получения теоретического оптимума . Дополнительно следовало бы отметить, что не все теоретически оптимальные фильтры передачи имеют подъем на краях полосы. В частности, системы с частичным откликом подъема на краю полосы не требуют (см. приложение В). Другой аспект оптимального расчета, который необходимо иметь в виду, состоит в том, что оптимальная характеристика ошибок достигается по отношению к мощности сигнала в стволе, а не по отношению к мощности передатчика без жльтрации. Именно это свойство допускает введение любого затухания в стволе у передатчика и не приводит к ухудшению оптимальной характеристики ошибок. При измерении характеристики ошибок по отношению к мощности передатчика без фильтрации наилучший фильтр передачи может отличаться от того, который определен формулой (6.24). Было бы желательно не только иметь меньшее затухание в середине полосы, о чем уже было сказано, но и может быть расширить полосу фильтра передачи. При этом затухание среза в фильтре передачи уменьшается, поэтому для уменьшения шумовой полосы полоса фильтра приема может быть сужена. В качестве крайнего примера того, как расширение полосы фильтра передачи может улучшить характеристику ошибок, рассмотрим удаление фильтра из передатчика и введение его в приемник. Для заданного сигнала на выходе усилителя мощности сигнал на входе детектора остается неизменным. Шумовая полоса приемника, однако, уменьшается, поскольку полоса составного фильтра стала уже полосы первоначального фильтра приема. Отсюда на входе детектора имеется повышенное отношение сигнал-шум. Ухудшение, вызванное удалением фильтра передачи, состоит, конечно, в значительно увеличившейся составляющей Р. Если соседние стволы отсутствуют или достаточно защищены за счет перекрестной поляризации (т. е. если ограничивающим фактором в системе является шум), то качество передачи может быть улутиено за счет такого переноса части затухания в области среза из передатчика в приемник, чтобы помехи со стороны соседних стволов стали сопоставимы с шумом. Следует иметь в виду, однако, что если ограничивающим фактором в системе являются помехи со стороны соседних стволов, то оптимальное распределение действительно определяется формулой (6.24). 6.3. ТРЕБОВАНИЯ НА ИЗЛУЧЕНИЕ При определении характеристик фильтрации в передатчике и приемнике необходимо обязательно учесть требования на излучение, установленные ФКС. Во многих случаях требования на излучение заставляют сужать полосу фильтра передачи по сравнению с теоретически оптимальной. В результате этого распределение характеристик фильтрации при расчете фильтров может быть определено заранее. Какая-то ирония содержится в том, что, будучи направлены на управление помехами со стороны соседних стволов, требования ФКС на излучение в некоторых случаях на практике приводят к увеличению помех, заставляя использовать фильтр приема с более широкой полосой, чем оптимальная. Требования ФКС, однако, были направлены на защиту соседних аналоговых радиостволов от внепо-лосных излучений цифровых стволов. Первые выбирались без учета возможности появления соседних цифровых стволов. В январе 1975 г., когда ФКС ввела требования на внепо-лосное излучение, были установлены две различные нормы для радиосистем, работающих в диапазонах частот ниже и выше 15 ГГц. Ограничения на излучение для работы в диапазоне частот ниже 15 ГГц являются более жесткими, чем для работы на частотах выше 15 ГГц, поскольку низкие частоты уже в весьма сильной степени используются для аналоговых радиосистем с ЧМ и частотным группообразованием, которые более чувствительны к помехам. Высокие частоты широко не применялись из-за подверженности сигналов затуханию в дожде. Эти частоты обычно служат для специальных применений на коротких расстояниях и не так загружены, как низкие. Наиболее широко используемыми диапазонами для цифровых СВЧ радиосистем являлись диапазоны 11 и 6 ГГц. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 [55] 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
|||||||||||||||||||||||||||||||||||||||||||