
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 [85] 86 87 88 89 90 91 у (Г) [Иияпульс на входе Импульсы на выходе 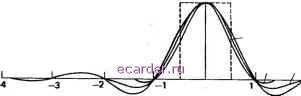 =, = 0.6 = 0.3 .u--1.. . I 3 4 Нормализованное времн tIT Рис. В.З. Импульсные реакции при характеристиках типа приподнятый косинус и различных значениях а тиками фильтров в канале. Часто спектр импульсов на входе рассчитывают исходя из того, что они прямоугольные и имеют длительность Т: при <КГ/2; для всех остальных случаев. Спектр, соответствующий x,(t) в выражении (В.З), является спектром типа (sin х) /х, называемым также функцией sine: Xs(t) = (Т sin nfT)/nfT = Т sine л/Т. (В.4) Если спектр на входе канала является таким, как он определен в выражении (В.4), то характеристика фильтра в канале, формирующего выходной сигнал типа приподнятый косинус , определяется как H(f) = Y,M)/K(f)- (В.5) Характеристики фильтров в канале, соответствующие выражению (В.5), показаны на рис. В.4 для тех же значений а, что и на рис. В.2. Как упоминалось в гл. 3, расчет сглаживающего фильтра в декодере цифрового речевого сигнала требует иногда некоторой модификации, подобной той, которая определена выражением (В.5). В упомянутом случае идеальный фильтр с плоской характеристикой для восстановления речевого сигнала на узких импульсоподобных дискретов следовало бы модифицировать путем деления плоской характеристики на спектр дискретов, имеющих конечную ширину, согласно выражению (В.4). Если длительность дискрета меньше периода дискретизации, характеристика типа (sinjt)/x, по существу, является плоской во всей полосе фильтра. Однако когда дискреты растягиваются на всю длительность периода дискретизации, характеристику фильтра для компенсации спада функции (sinx)/x следовало бы сделать с подъемом. Как рассматривалось в гл, 6, характеристика фильтрации в стволе обычно распределяется между передатчиком и приемником. Так называемое оптимальное распределение характеристики фильтрации происходит тогда, когда характеристика фильтра приема определяется как корень квадратный из желаемой характеристики на выходе ycW, а в качестве характеристики фильтра передачи остается то, что необходимо для получения на входе ствола спектра в виде характеристики, комплексно-сопряженной с характеристикой фильтра приема. (Спектр на выходе передатчика также соответствует корню квадратному из желаемой характеристики ствола.) Если на вход ствола поступают импульсы длительностью Т, оптимальные характеристики определяются как (В.6) Для точности здесь следовало бы добавить слово существенно .- Прим. перев. H Jf) = fYjf) /X,(f). (В.7) Отметим, что спектр на передаче, полученный из H (f) в формуле (В.6), соответствует корню квадратному из желаемой характеристики на выходе ствола независимо от того, какова форма импульса на входе. Отсюда при использовании оптимального распределения характеристик фильтрации спектр на передаче и расчет прием1шка не зависят от сигнала, подаваемого на вход ствола. а = 0.3  0 = 0,6  -0,5 0.5 1 Нормализованная частота fT -0.5 0,5 1 Нормализованная частота fT Рис. В.4. Характеристики фильтрации в канале, необходимые для получения на выходе характеристики типа приподнятый косинус , когда на вход поданы импульсы вида sin (0)Г/2)/((йГ/2) Рис. в.5. Оптимальные характеристики фильтрации на передаче и приеме для характеристики вида приподнятый косинус при а = 0,3 и входном сигнале вида sin (соГ/2)/(мГ/2) Характеристики фильтрации на передаче и приеме для входных сигналов в виде прямоугольных импульсов, соответствующие формулам (В.6) и (В.7), показаны на рис. В.5 . Отметим, что характеристика фильтрации на передаче имеет подъем на частотах, не равных нулю. Внесение затухания на средних частотах полосы является одной из причин того, почему оптимальное распределение может не быть таким в системах, где ограничивающим фактором является мощность на передаче. В.2.1. Оптимальная фильтрация для минимальной манипуляции Как было показано в гл. 6, минимальную манипуляцию (ММ) можно представить как модуляцию с квадратурными каналами при подаче на вход сигналов в виде импульсов постоянного тока косинусоидальной формы: (cos Ы/Т) = {о Преобразование Xc(t) имеет вид: во всех остальных случаях. я cos л/Г ~2гТ=727гр- (В.8) (В.9) Если желательно получить выходную характеристику типа приподнятый косинус и оптимальное распределение требований к фильтрам, то характеристики фильтрации при ММ определяются как Wnp,r/; = УПсТлГ; <в.10) При данном рассмотрении предполагается передача импульсами постоянного тока. Эти принципы можно легко распространить на системы с передачей на несущей путем переноса характеристик фильтрации на несущую частоту. ЯпрдГ/; = -\jYrc(f) /x,(f). (B.ii) Спектр на передаче и характеристика приемника для системы с ММ и оптимальным распределением идентичны соответствующим показателям системы типа 4-ФМ со сдвигом и оптимальным распределением! В.2.2. Системы с частичным откликом в качестве другого примера расчета щфровой системы передачи рассмотрим систему с частичным откликом вида 1+£>. Требуемая реакция канала во времени определяется выражением (В.12), а соответствующий спектр - выражением (В.13): yjt) = 4cos (nt/T)/n [1- at/T)]; (В.12) квадратному из требуемой характеристики на выходе Y(t). Если на вход канала подаются прямоугольные импульсы длительностью Т, как определено в формуле (В.З), то оптимальные характеристики фильтрации выражаются следующим образом: при /< 1/2Г,-при /К 1/2Г; (В.14) (В.15) где Xg(f) определено в выражении (В.4). Оптимальные характеристики фильтрации, определенные выражениями (В.14) и (В.15), показаны на рис. В.7 совместно с требуемой характеристикой на выходе канала. Отметим, что в отличие от систем с полным откликом ( приподнятый косинус ) оптимальное распределение в системе с частичным откликом не требует подъемов в характеристике фильтра передачи. YJf) = cos л/Г при 1/2Г; О для всех остальных случаев. (В.13) Импульсная реакция канала с частичным откликом вида 1+D показана на рис. В.6. Отметим, что одиночный импульс создает одинаковую реакцию в двух последовательных моментах решения, но пересекает нулевую линию во всех остальных моментах решения. Оптимальное распределение требований к фильтрам достигается снова в случае фильтра приема, имеющего частотную характеристику, которая соответствует корню Импульс на входе 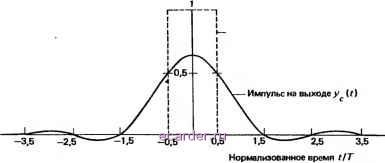 Рис. В.6. Импульс на выходе канала с частичным откликом вида l-\-D В.З. АНАЛИЗ ВЕРОЯТНОСТИ ОШИБКИ ДЛЯ СИСТЕМ С ПЕРЕДАЧЕЙ ИМПУЛЬСАМИ ПОСТОЯННОГО ТОКА В.3.1. Передача двоичными сигналами Рассмотрим модель приемника цифровой системы передачи, показанную на рис. В.8. Приемник состоит из двух частей: цепи обработки сигнала и обнаружителя цифрового сигнала (решающего устройства). Предположим пока, что на выходе цепи обработки сигнала образуется импульс с амплитудой ~\-V, когда передается единица, и импульс с амплитудой -V, когда передается 0. Очевидно, обнаружитель просто оценивает на своем входе полярность сигнала в моменты решения, определяемые тактовой частотой. Ошибки при решении возникают в том случае, если шум в моменты решения имеет амплитуду более V и полярность, противоположную полярности переданного импульса. Сигнал -V -  фильтр, обрабатывающий сигнал 1(Ю1
Рис. в.7. Частотные характеристики канала с частичным откликом вида 1+£> и оптимальные характеристики фильтров при подаче на вход сигнала вида sin (1оГ/2;/(шГ/2; Рис. В.8. Модель приемника цифровых сигналов Предполагается, что шум, наиболее часто рассматриваемый при анализе, имеет гауссовское, или нормальное, распределение вероятностей. В соответствии с этим, вероятность ошибки можно определить как г-~ \ е -у2ла у (В.16) где представляет собой мощность шума на входе решающего устройства. Используя функцию ошибок eTfz = ~\e~dt, л/я о (В.17) 511 можно иногда представить формулу (В. 16) в виде Ре= (l+erfz)/2, где Z = V 112 а. (В.18) Вероятность ошибки может быть также выражена через функцию, дополняющую функцию ошибок: Ре= (erfcz)/2. (В.19) где erfc Z = 1 - erfz; z = F / 20. Вместо оценки интеграла в формулах (В.17) и (В.19), которые можно представить только рядами, функции ошибок могут быть аппроксимированы как erfc Z еГ /2\/я при z l. (В.20) В.3.3. Отношение энергии на бит к плотности шума Предыдущие выражения для вероятности ошибки связывают Р с энергией сигнала в моменты решения и мощностью шума на входе решающего устройства. При сопоставлении различных способов модуляции цифровыми сигналами, в частности для многоуровневых систем, более удобно связать характеристику вероятности ошибки с мощностью сигнала и мощностью шума на входе приемника (перед цепью обработки сигнала). В качестве первого шага при выводе выражения для вероятности ошибки, основанного на отношении сигнал-шум на входе приемника, определим мощность шума на входе решающего устройства. Дисперсия шума a, использованная в предыдущих формулах, точно равна значению мощности, которая была бы измерена на входе решающего устройства при отсутствии сигнала. Мощность шума можно определить аналитически: = \ \Н(}) (JVc/2) М = No \ \Н (f) fdf = (В.24) В.3.2. Многоуровневая передача Вероятность ошибки в многоуровневой системе передачи импульсами постоянного тока можно легко определить путем соответствующего уменьшения расстояния ошибок. Если максимальная амплитуда равна V, расстояние ошибок между равномерно расставленными уровнями на входе решающего устройства D=F/(Z.-1), (В.21) где L - число уровней. Подстроив расстояние ошибок d для двоичной системы под то, которое определено в (В.21), получим вероятность ошибки в многоуровневой системе: log2i erfc (L-1) /2о (В.22) где коэффициент (L-l)/L отражает тот факт, что внутренние уровни в сигнале подвержены воздействию шума с положительной и отрицательной амплитудами; коэффициент l/log2L является результатом предположения, что в многоуровневой системе сигнал кодируется таким образом, чтсйы ошибки в символах приводили к одиночным ошибкам в двоичном сигнале (log2Z- равен числу битов на символ). Из выражения (В.22) следует, что с учетом отношения пикового значения сигнала к шуму на входе решающего устройства при 1,-уровневой передаче вносится ухудшение (смещение) характеристики ошибок, равное 20 lg(L-1) дБ. Если V увеличить в 1,-1 раз, то вероятность ошибки в L-уровневой системе становится равной вероятности ошибки в двоичной системе (без учета коэффициента l/log2i и (L-l)/L, которые обычно соответствуют нескольким десятым децибела). Выражение (В.22) связывает вероятность ошибки с пиковой мощностью сигнала V. Для определения вероятности ошибки по отношению к средней мощности сигшла в 1,-уровневой системе эта мощность определяется путем усреднения мощностей, соответствующих амплитудам различных импульсов; Предполагается, что появление различных амплитуд IV/ (Z.-1) 1 [ + 1,±3,...,± (Z.+ 1) 1 равновероятно. 512 = NcBjv. (В.25) где IVc - односторонняя спектральная плотность мощности шума в ваттах на герц, а Вдг=5)Ж/)й/ - полоса, эквивалентная по шуму, или просто шумовая полоса о фильтра приема с характеристикой Н(/). В выражении (В.25) предполагается, что шум источника является белым, т. е. во всей интересующей полосе спектральная плотность одинакова. Такой шум может существовать в самой среде передачи или возникнуть в первых- каскадах усиления приемника. Если бы измерялось значение мощности шума, прошедшего идеальный фильтр с шириной полосы, равной В, были бы получены показания NoB Вт. Таким образом, Вдг представляет собой ширину полосы идеального фильтра, который пропускает ту же мощность шума, что и фильтр приема с характеристикой Я(/). (Амплитудно-частотная характеристика Н(/) может быть существенно неидеальной.) Характеристика приемника Я(/) непременно обеспечивает компромисс между двумя противоречивыми целями. Во-первых, она должна минимизировать мощность шума, проходящего к решающему устройству (т. е. минимизировать Bf). Во-вторых, должна быть в максимально возможной степени увеличена разница между значениями (-[- V и - V) в моменты решения. Очевидно, что следовало бы сделать максимальным отношением сигнал-щум на входе решающего устройства (F/a), чтобы минимизировать вероятность ошибки. Классический вывод из теории цифровой связи устанавливает, что V/a становится максимальным, когда Я(/) согласована с принимаемым сигналом. При рассмотрении во временной области характеристика согласованного фильтра реализуется путем умножения принимаемого сигнала на каждый из видов импульсов (без шума), которые могут быть приняты. Сигналы на н>1ходе умножителей (корреляторов) интег(жруются на тактовом интервале для определения результирующего среднего значения коэффициента корреляции в течение этого интервала. Интегратор, на выходе которого появится наибольший сигнал, с наибольшей вероятностью указывает на символ, который был передан. В большинстве систем все сигналы или импульсы имеют одинаковые формы, а различаются только по амплитуде и полярности. Поэтому может быть использован единственный согласованный фильтр. Решение попросту заключается в сопоставлении сигнала на выходе согласованного фильтра с соответствующими уровнями решения. Сигнал на выходе единственного коррелятора hit) с интегратором имеет вид V = \5(0 Ат dt = \s(0 fdt, (В.26) где s(t) описывает форму сигнала или импульса, подлежащую измерению. Отметим, что V, по существу, представляет собой меру энергии сигнала на тактовом интервале Т. Здесь слово односторонняя означает, что мощность шума берется, например, только для положительных частот.- Прим. перев. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 [85] 86 87 88 89 90 91 |